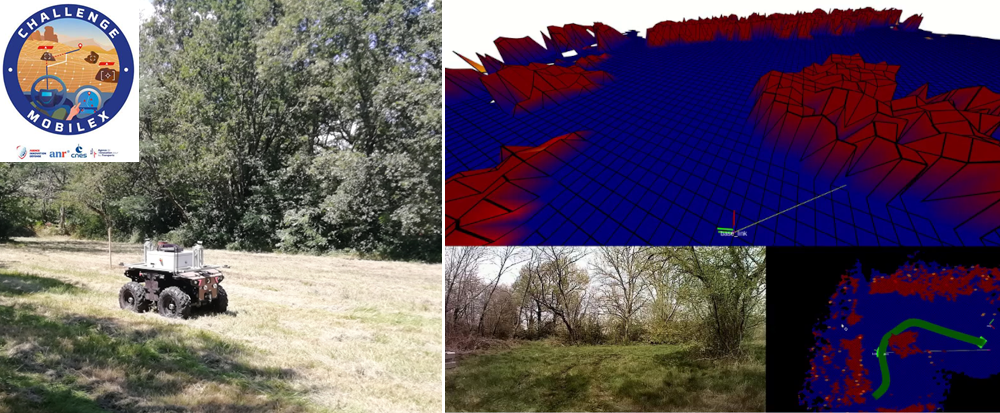
L'ONERA DTIS a été sélectionné en partenariat avec la PME bordelaise Génération Robots parmi les sept équipes participantes au Challenge MOBILEX sur la mobilité autonome des véhicules terrestres en environnement complexe. Ce challenge lancé fin 2023 et organisé conjointement par l'Agence de l’innovation de défense (AID) et l’Agence nationale de la recherche (ANR) comprend trois défis annuels de difficulté croissante qui évalueront les différentes solutions technologiques intégrées sur un démonstrateur robotisé mis à disposition de chaque équipe par la société Shark Robotics. Ces solutions devront prendre en compte l’ensemble des fonctions et des contraintes à considérer pour gérer la trajectoire d’un véhicule autonome évoluant en environnement complexe voire déstructuré. La contribution ONERA s'appuie sur des capteurs de différents types (GNSS, IMU, vision, LiDAR 3D) et plusieurs niveaux de traitement embarqués afin de fournir une représentation globale multi-modale permettant de qualifier précisément l’environnement du robot et générer dynamiquement la trajectoire du véhicule afin de répondre aux objectifs du Challenge, en interaction avec un opérateur distant nourri par un flux d’information synthétique.
Consortium
Le consortium PANAME (Perception Augmentée pour la Navigation en Milieu Extérieur) est composé de la PME expérimentée et agile GENERATION ROBOTS dotée d’une forte expérience dans la réalisation de solutions de robotique mobiles terrestres autonomes concrètes et maturées, et de l’ONERA DTIS laboratoire de recherche public ayant la capacité reconnue de proposer des solutions au-delà de l’état de l’art pour la robotique autonome. La PME apporte non seulement son expertise en intégration de capteurs et matériels outdoor mais également plus de 12 ans d’expertise dans le développement d’algorithmes de navigation autonome concrétisés depuis 2 ans par la commercialisation d’un robot autonome pour la sécurité.
Axes
L’objectif du projet est de concrétiser et confronter au réel des techniques novatrices selon les axes suivants :
- L’exploitation de différentes modalités sensorielles et leur fusion permettant d’une part de qualifier et d’optimiser la perception de l’environnement et le degré de confiance, et d’autre part d’identifier les situations perceptives dégradées en évaluant l’intégrité des informations reçues. Plusieurs capteurs de nouvelle génération seront testés et intégrés afin d’améliorer la perception et la compréhension de l’environnement immédiat du robot.
- L’intégration des informations capteurs dans une représentation globale multi-modale permettant de qualifier précisément l’environnement du robot d’un point de vue géométrique et sémantique. Cette intégration reposera sur des prétraitements avancés des différentes modalités permettant de les enrichir et de les annoter, et sur leur exploitation sous forme de cartographie multi-modale servant aux retours opérateur et à la génération de trajectoire.
- La génération et l’exécution de trajectoires dynamiques basées sur la cartographie multi-modale générée précédemment, exploitant une localisation robuste du système. Plusieurs trajectoires seront évaluées en parallèle et sélectionnées en fonction de critères inhérents à la mission, à l’environnement identifié et aux capacités du véhicule, mais aussi en fonction des opportunités d’acquisition d’information permettant d’enrichir la cartographie ou de lever des ambiguïtés de perception.
- Un mécanisme de décision interactive présenté à travers une interface utilisateur dans laquelle l’opérateur ne sera impliqué que sur des actions de haut niveau. Ce mécanisme évaluera l’ensemble des statuts remontés par les capteurs et les sous-systèmes et décidera si l’utilisateur doit être sollicité pour téléopérer le robot ou pour fournir des informations de plus haut niveau permettant au système de continuer sa tâche en autonome. L’accent sera mis sur la compréhension et l’expérience utilisateur.
Contributions
La mise en œuvre de ces mécanismes algorithmiques est pensée pour être évolutive afin de s’adapter aux différents défis du challenge Mobilex et à l’augmentation de complexité au travers des éléments suivants :
- Une architecture capteur distribuée et évolutive permettant d'ajouter et d’exploiter des modalités en fonction des besoins.
- Une architecture de fusion de données conçue dès le départ pour prendre en charge différentes sources d’information à travers des représentations communes.
- Une architecture générique de remontée des statuts des capteurs et sous-systèmes et des mécanismes de décision permettant d’adapter la réaction du système.
Le projet s’appuie sur une méthodologie projet éprouvée, faisant largement place aux tests terrains (test and learn). L’objectif principal sera de proposer un avancement de l’état de l’art significatif à l’issue des 3 ans et une exploitation industrielle rapide de ces avancées.
Projets connexes
ANR VORTEX, ANR NAIAD, PRF SICICOD, Challenge CoHoMa
Contact
Julien Marzat (DTIS)