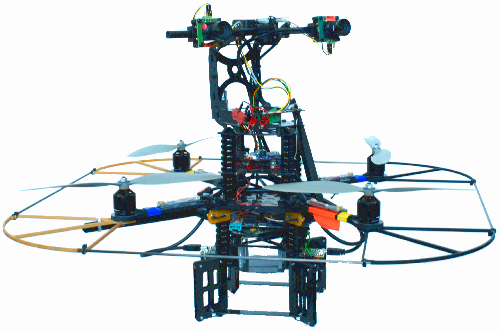
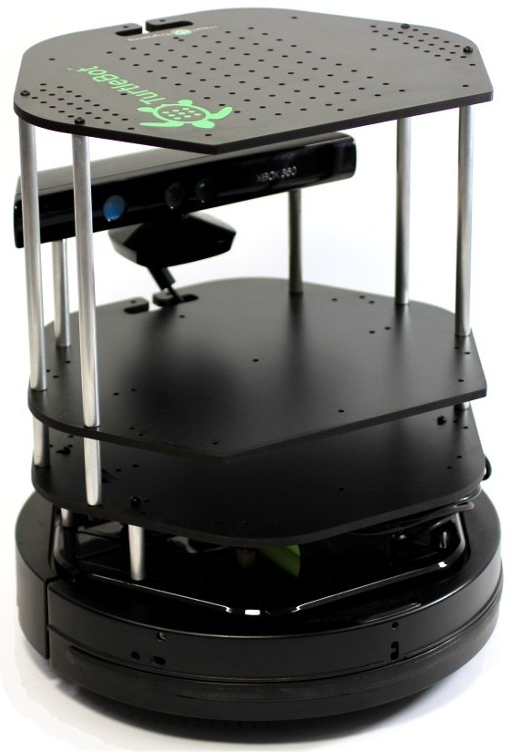
Ground and aerial experimental platforms are used to validate the developped algorithms (ROS C++/Python) and perform demonstrations in realistic conditions. All the platforms are equipped with multiple sensors (vision, IMU, ultrasonic sensors, Laser telemeters).
Aerial Vehicles
Image
| Image

| Image

|
Ground Vehicles
Image

| Image

| Image
| Image

|
Flying arena with Optitrack motion capture system
