| 2024 - Journal papers | 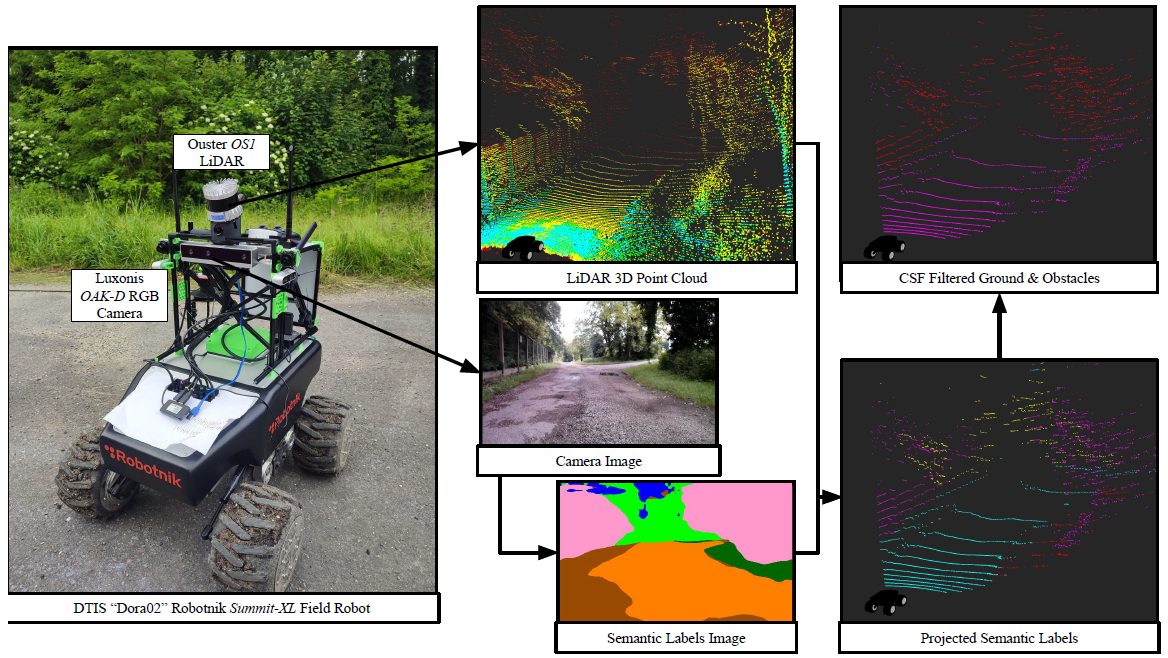 | Continuous Online Semantic Implicit Representation
for Autonomous Ground Robot Navigation in
Unstructured EnvironmentsQ. Serdel, J. Marzat, J. Moras
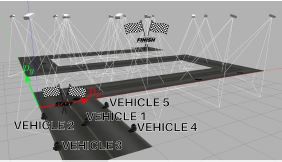
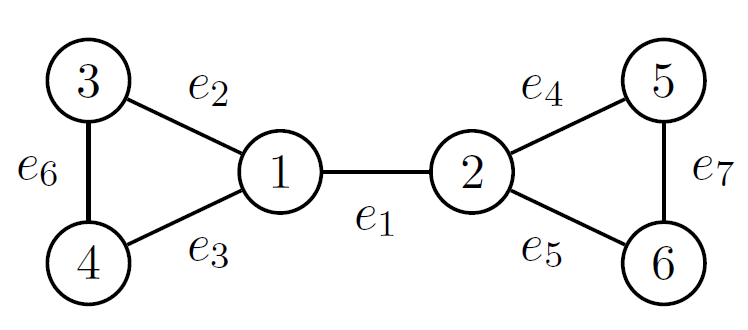
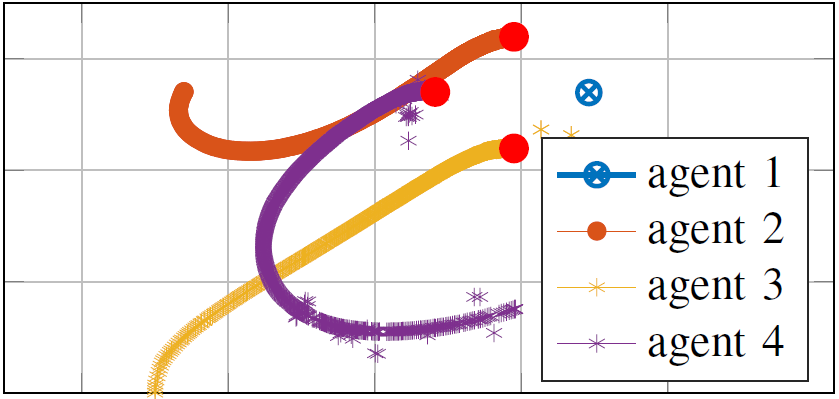
Robotics, 2024 Link |  | Distributed Bipartite Containment Tracking over
Signed Networks with Multiple LeadersP. Sekercioglu, I. Sarras, A. Loria, E. Panteley, J. Marzat
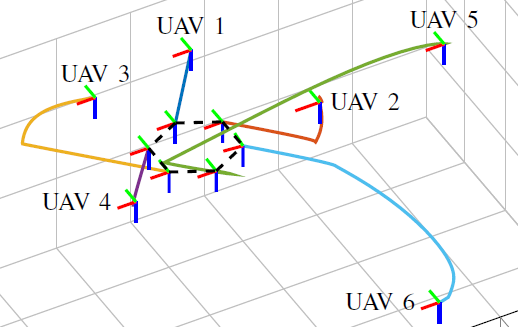
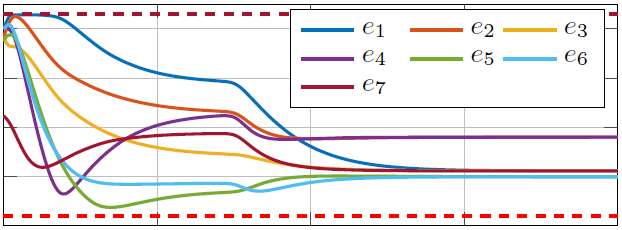
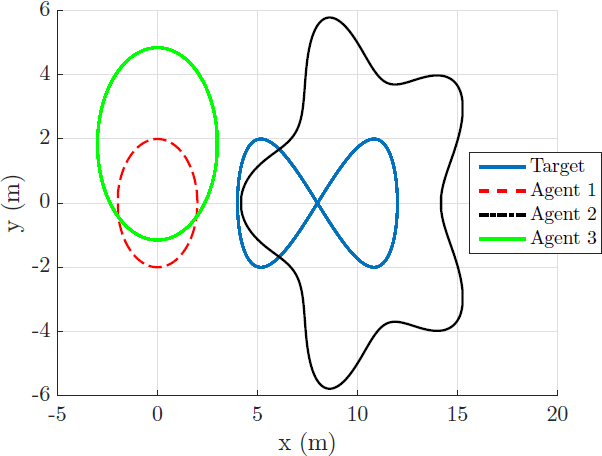
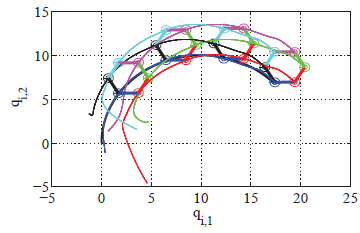
IEEE Transactions on Control of Networked Systems TCNS, 2024 Link |  | Robust Formation Control of Robot Manipulators
with Inter-agent Constraints over Undirected
Signed NetworksP. Sekercioglu, B. Jayawardhana, I. Sarras, A. Loria, J. Marzat
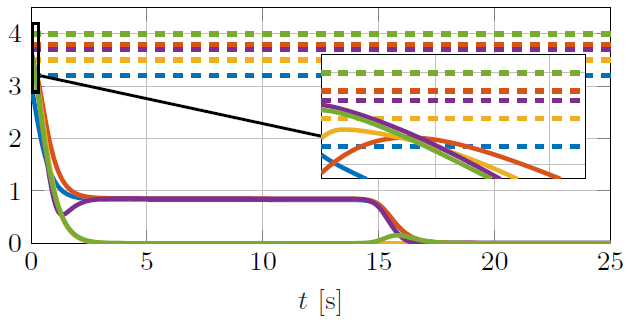
IEEE Transactions on Control of Networked Systems TCNS, 2024 Link |  | Leader-follower and leaderless bipartite
formation-consensus over undirected coopetition
networks and under proximity and collisionavoidance
constraintsP. Sekercioglu, I. Sarras, A. Loria, E. Panteley, J. Marzat
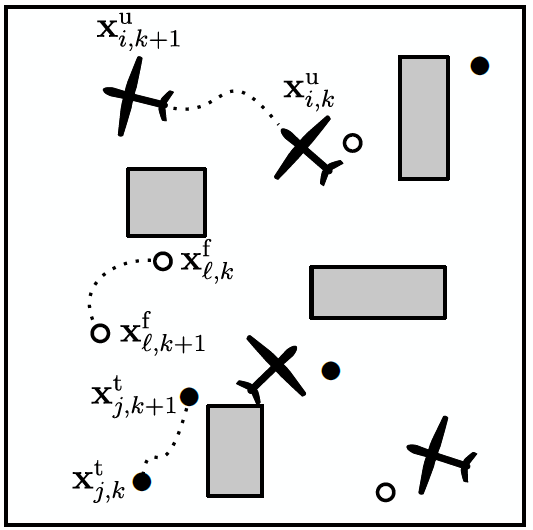
International Journal of Control, 2024 Link |  | Set-membership target search and tracking
with cooperating UAVs using vision systemsM. Zagar, L. Meyer, M. Kieffer, H. Piet-Lahanier
arXiv:2403.15113v2, 2024 Link | |
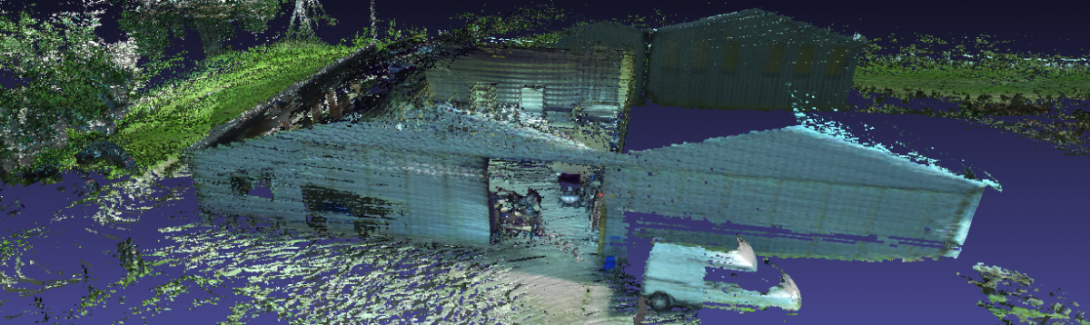
| A Case Study of Semantic Mapping and Planning for Autonomous Robot NavigationS. Achat, Q. Serdel, J. Marzat, J. Moras
SN Computer Science, 5(55) 2024 Link | | 2024 - Conference papers |  | Model-Free versus Model-Based Reinforcement Learning for Fixed-Wing UAV Attitude Control Under Varying Wind ConditionsD. Olivares, P. Fournier, P. Vasishta, J. Marzat
ICINCO, 2024 Link |  | Formation Control of
Cooperative-Competitive Robot
Manipulators with Inter-agent ConstraintsP. Sekercioglu, B. Jayawardhana, I. Sarras, A. Loria, J. Marzat
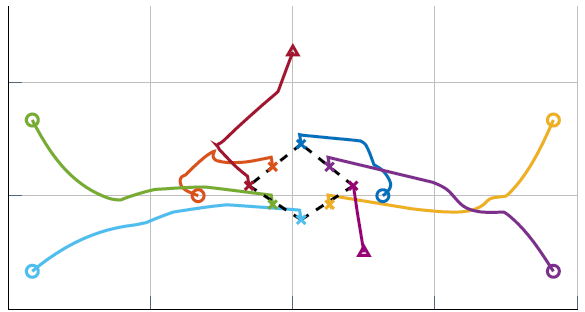
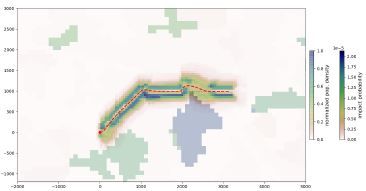
IFAC MICNON, 2024 Link |  | Smooth Path Planning Using a Gaussian Process Regression Map
for Mobile Robot NavigationQ. Serdel, J. Marzat, J. Moras
IFAC Workshop on Robot Motion Control (RoMoCo), 2024 Link |  | DroPong: Enthusing Learners about Control Engineering by Revisiting
the Pong Game with Aerial and Ground DronesS. Bertrand, C. Stoica, A. Thakker, C. Croon, A. Hanne, C. Hosxe, S. Kretz, A. Mol, A. Philippe
2024 European Control Conference (ECC) Link |  | Commande prédictive distribuée sous contraintes de
partitionnement pour une flotte de robots mobilesS. Bertrand, M. Zodros
2ème Congrès Annuel de la SAGIP, 2024 Link |  | Feedback on Drone Arenas-based Remote
international Teaching – DAReTeachC. Stoica, S. Bertrand, L. Burlion
2024 IFAC Workshop on Aerospace Control Education Link |  | Safe Deep Reinforcement Learning Control with Self-Learned Neural
Lyapunov Functions and State ConstraintsP. Cocaul, S. Bertrand, H. Piet-Lahanier
10th International Conference on Control, Decision and Information Technologies
CoDIT 2024 Link |  | SETCMAS: An easy-to-use software stack to facilitate Simulations and
Experiments in Teaching Control of Multi-Agent SystemsS. Bertrand
2024 European Control Conference (ECC) Link + Open-source code | 2023 - Journal papers |  | Localization of Partially Hidden Moving Targets Using a Fleet of UAVs via Bounded-Error EstimationJ. Ibenthal, L. Meyer, H. Piet-Lahanier, M. Kieffer
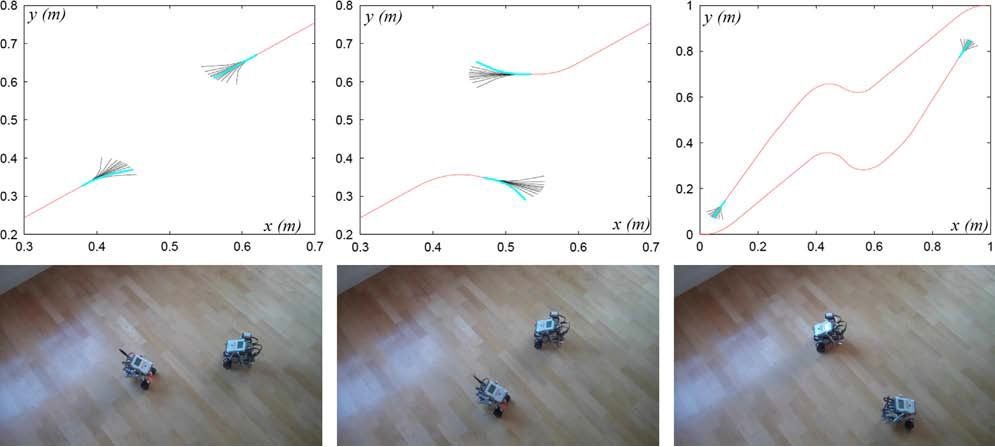
IEEE Transactions on Robotics, 2023 Link |  | Distributed Control for Multi-Robot Interactive Swarming Using Voronoi PartioningA. Eudes, S. Bertrand, J. Marzat, I. Sarras
Drones, 7(10), 2023. Link | |
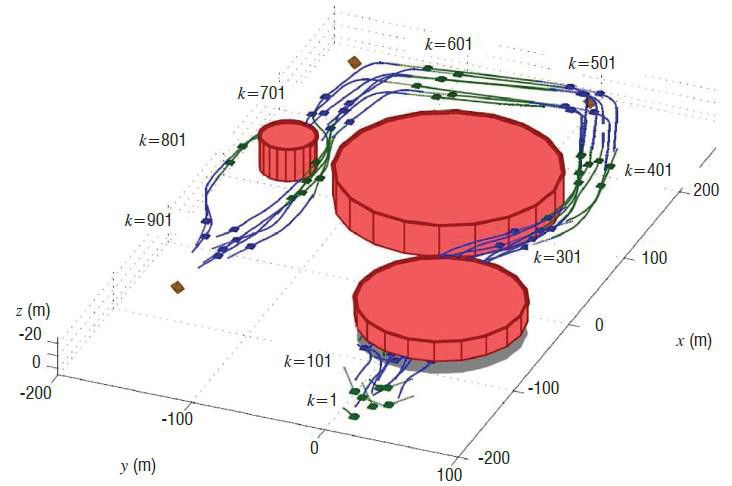
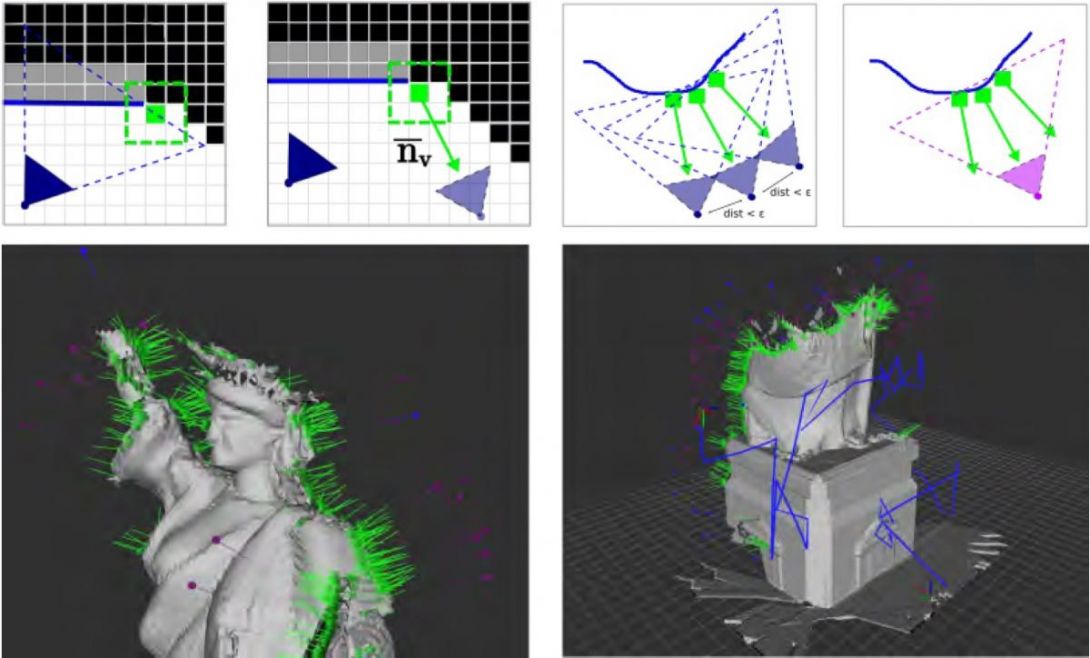
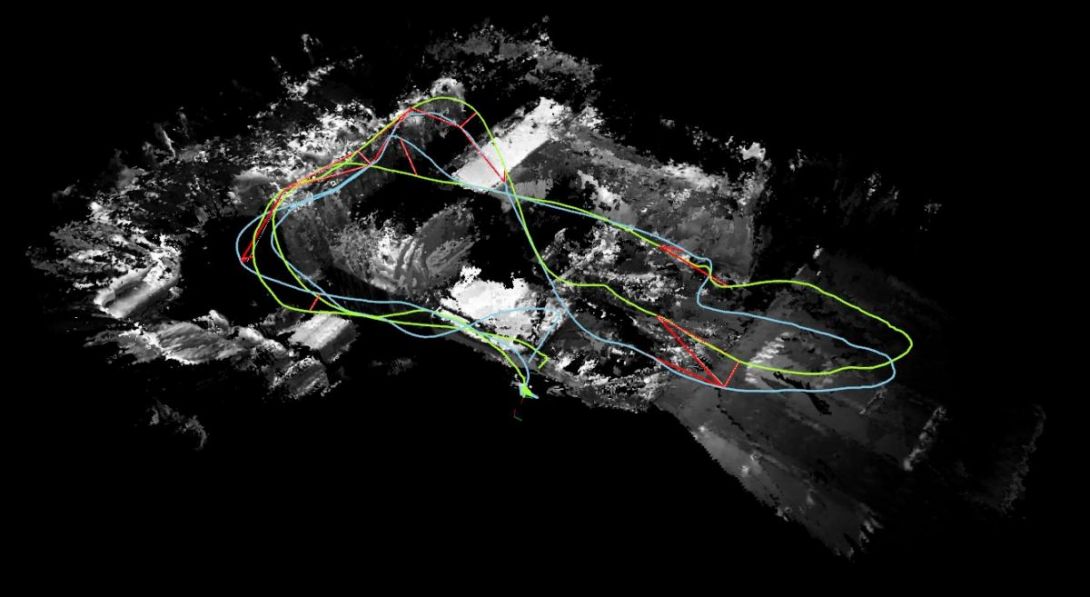
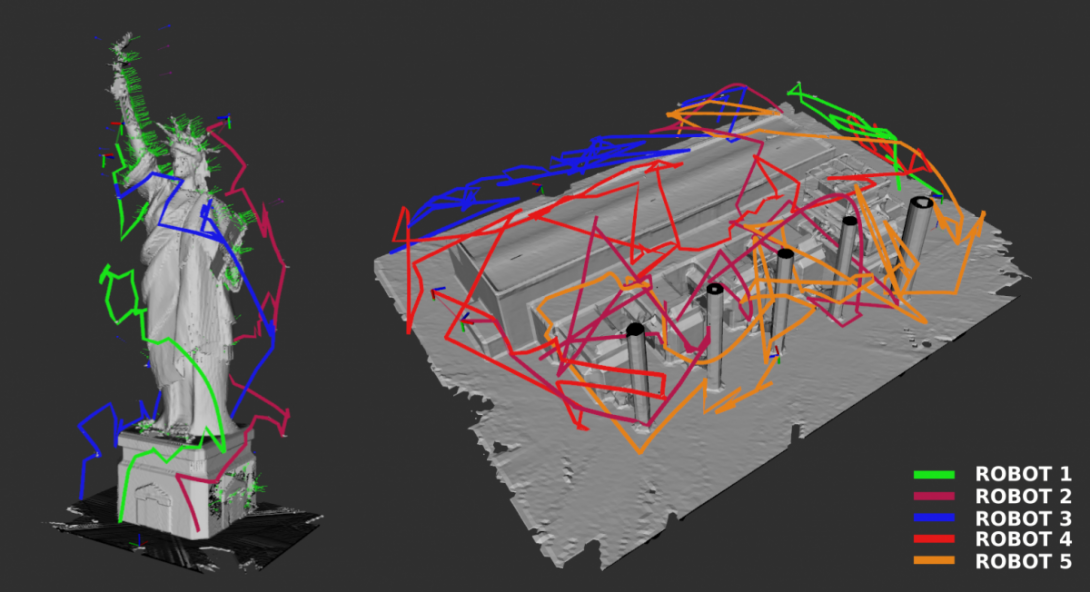
| A Multi-Robot System for 3D Surface Reconstruction with Centralized and Distributed ArchitecturesG. Hardouin, J. Moras, F. Morbidi, J. Marzat, E.M. Mouaddib
IEEE Transactions on Robotics, 2023. Pdf | |
| Multi-vehicle localization by distributed MHE over a sensor network with sporadic measurements: Further developments and experimental resultsA. Venturino, C. Stoica Maniu, S. Bertrand, T. Alamo, E. F. Camacho
Control Engineering Practice, vol. 132, 2023. Pdf - [CEP Best paper Award] | 2023 - Conference papers |  | Set-membership vs. stochastic approaches for target localization with UAVsJ. Ibenthal, M. Kieffer, H. Piet-Lahanier, L. Meyer
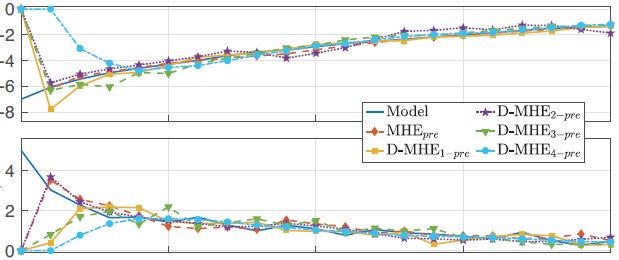
IFAC-PapersOnLine, 56(2), 3326-3333, 2023 Link | 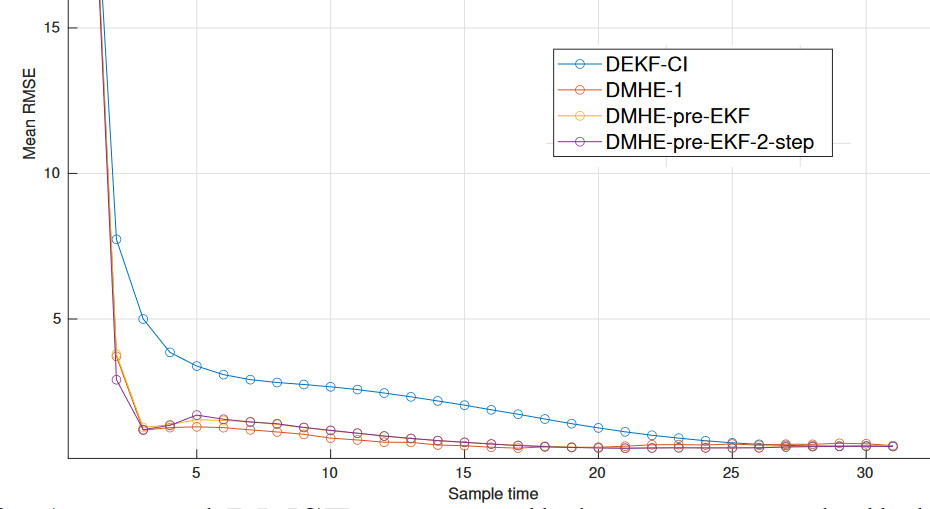 | Cooperative Localization of an UAV Fleet using Distributed MHE with EKF Pre-estimation and Nonlinear MeasurementsM. Borelle, S. Bertrand, C. Stoica, T. Alamo, E.F. Camacho
27th International Conference on System Theory, Control and Computing (ICSTCC), 2023 Link | 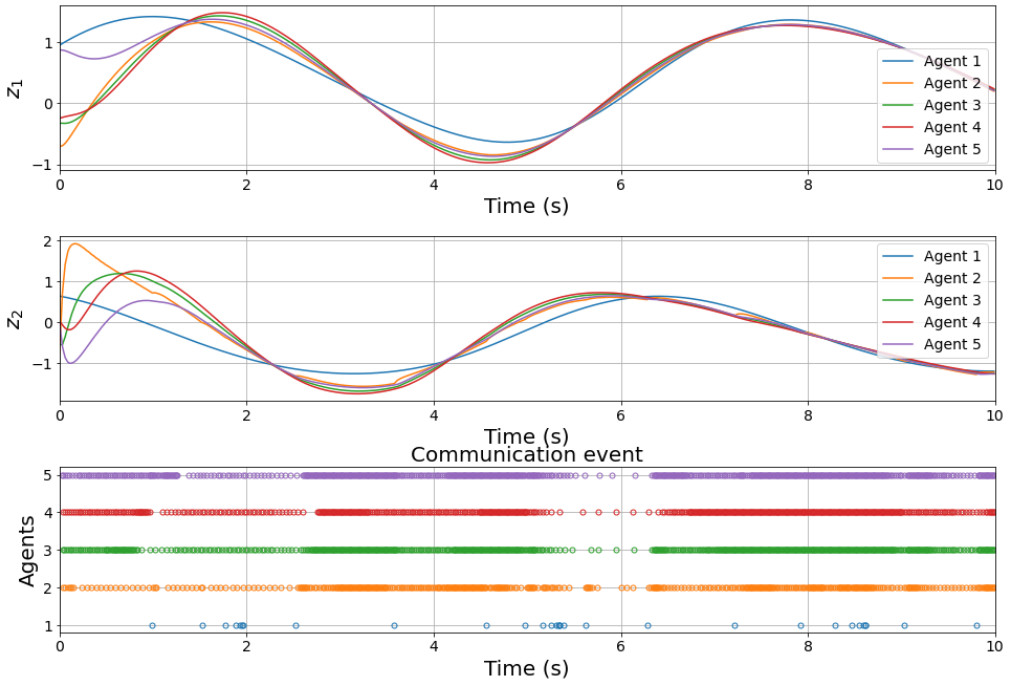 | Distributed Event-Triggered Leader-Follower Consensus of Nonlinear Multi-Agent SystemsM. Marchand, V. Andrieu, S. Bertrand, H. Piet-Lahanier
31st Mediterranean Conference on Control and Automation (MED), 2023 Link + Extended version | 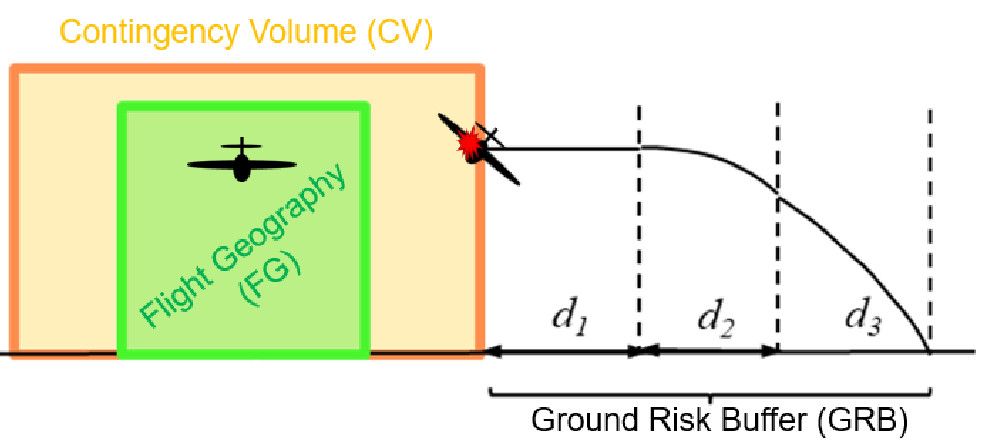 | Handling Uncertainties in Ground Risk Buffer Computation for Risk Assessment and Preparation of UAV OperationsS. Bertrand, S. Lala, N. Raballand
International Conference on Unmanned Aircraft Systems (ICUAS), 2023 Link |  | A Short Curriculum on Robotics with Hands-On Experiments in Classroom Using Low-Cost DronesS. Bertrand, C. Trabelsi, L. Prevost
International Conference on Robotics in Education (RiE), 2023 Link | 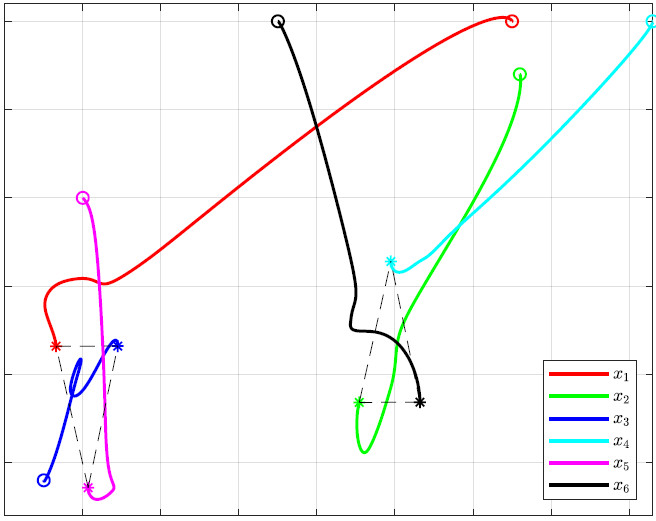 | Bipartite Formation over Undirected Signed Networks with Collision AvoidanceP. Sekercioglu, I. Sarras, A. Loria, E. Panteley, J. Marzat
62nd IEEE Conference on Decision and Control, December 13-15, Marina Bay Sands, Singapore, 2023 Link | 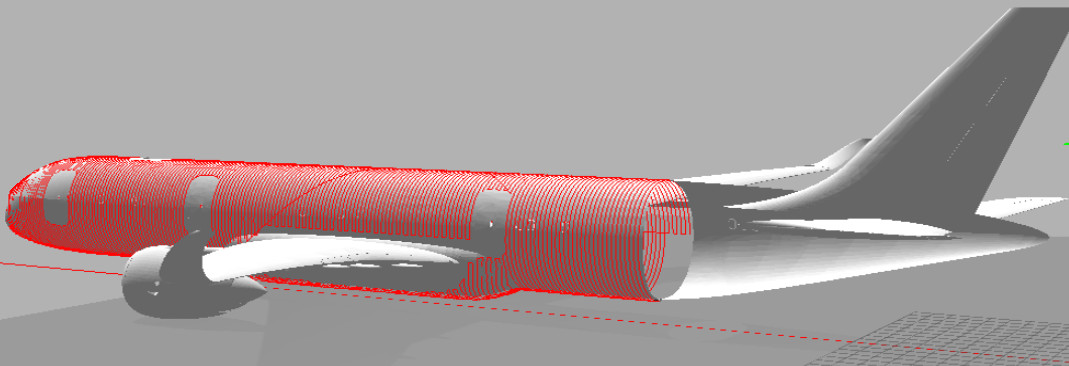 | Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft ApplicationsS. Achat, J. Marzat, J. Moras
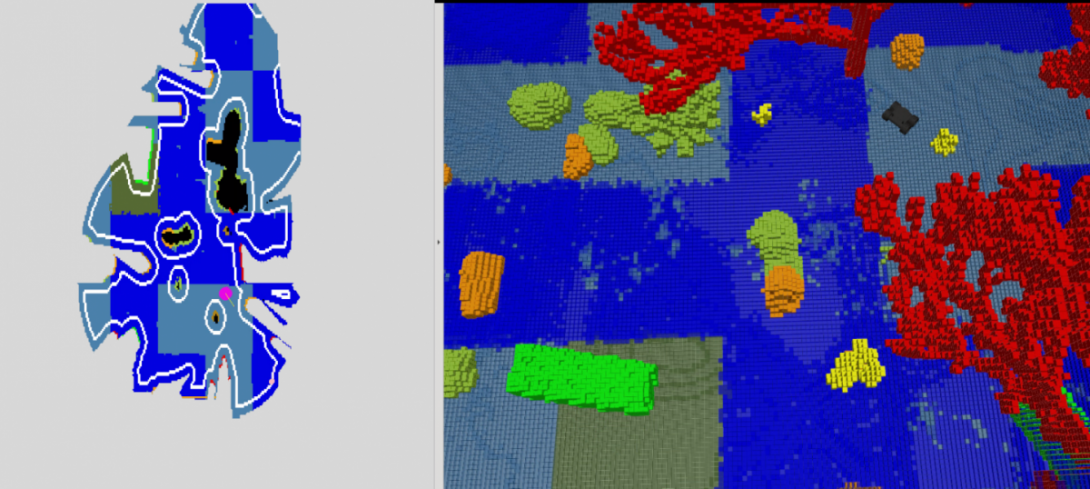
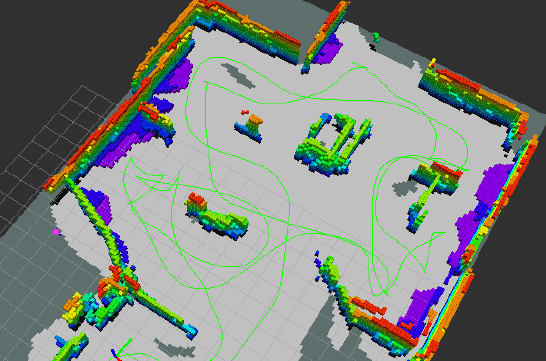
20th International Conference on Informatics in Control, Automation and Robotics (ICINCO), November 13-15, Roma, Italy, 2023 Link | 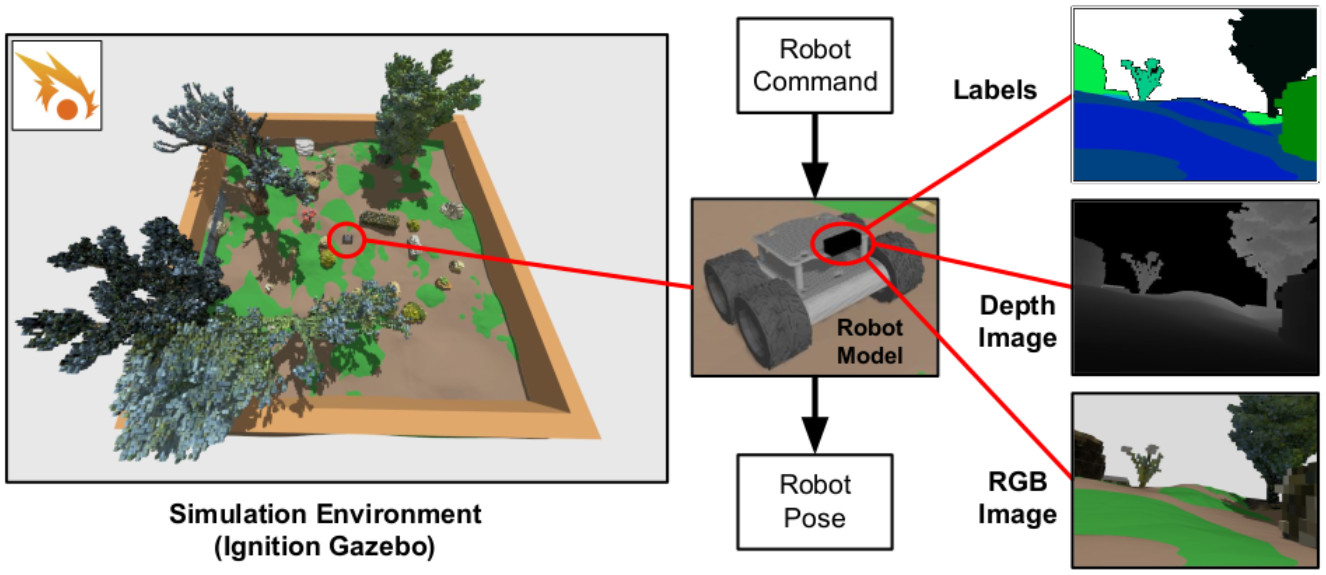 | SMaNa: Semantic Mapping and Navigation Architecture for Robotic ExplorationQ. Serdel, J. Marzat, J. Moras
20th International Conference on Informatics in Control, Automation and Robotics (ICINCO), November 13-15, Roma, Italy, 2023 Link | 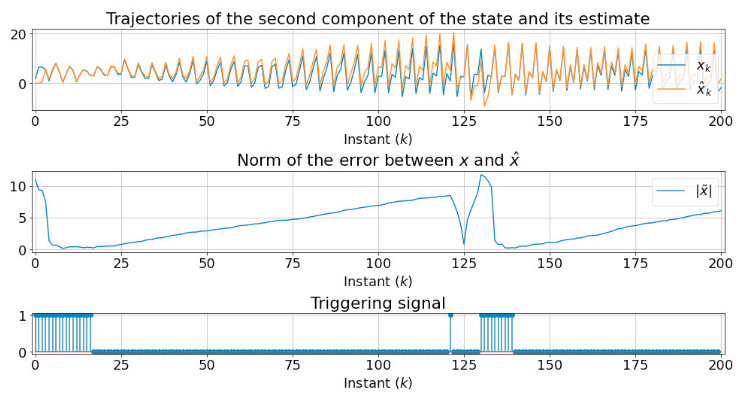 | Deep Learning of a Communication Policy for an Event-Triggered Observer for Linear SystemsM. Marchand, V. Andrieu, S. Bertrand, S. Janny, H. Piet-Lahanier
IFAC-PapersOnLine, 56(2), 5261-5268, 2023 Link | |
| Exponential Bipartite Containment Tracking over Multi-leader Coopetition NetworksP. Sekercioglu, E. Panteley, I. Sarras, A. Loria, J. Marzat
American Control Conference, San Diego, CA, USA, 2023 Pdf | 2022 - PhD Theses | |
| A centralized and distributed multi-robot system for 3D surface reconstruction of unknown environmentsG. Hardouin Pdf | |
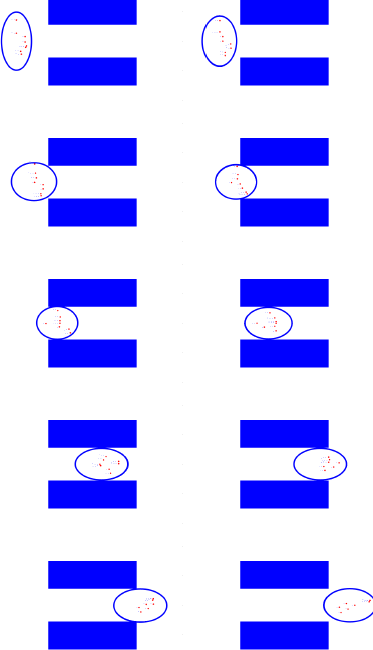
| Pistage multi-cibles par méthodes ensemblistes non-linéairesJ. Ibenthal Link | |
| Estimation d'état distribuée sous contraintes pour une mission de surveillance multi-capteurs multi-robotsA. Venturino Link | 2022 - Journal papers / Chapters | |
| Robust Consensus of High-Order Systems under Output Constraints: Application to Rendezvous of Underactuated UAVsE. Restrepo, A. Loria, I. Sarras, J. Marzat
IEEE Transactions on Automatic Control, 2022. Pdf | |
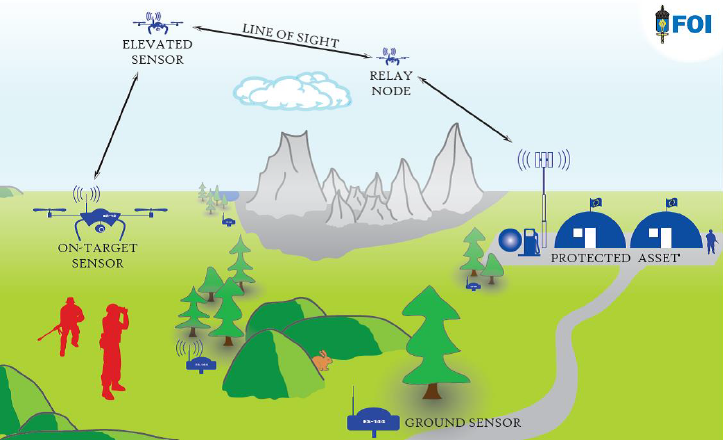
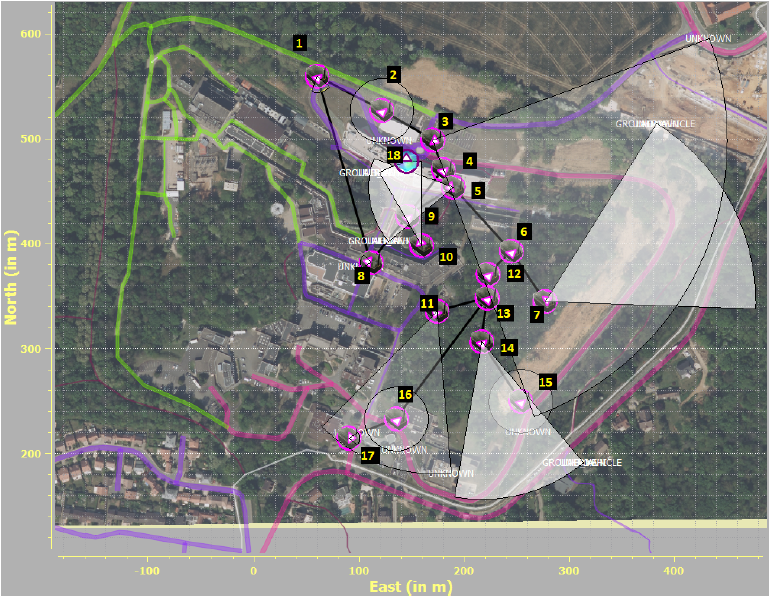
| Autonomous Unmanned Heterogeneous Vehicles for Persistent MonitoringV. Lappas, H.-S. Shin, A. Tsourdos, D. Lindgren, S. Bertrand, J. Marzat, H. Piet-Lahanier, Y. Daramouskas, V. Kostopoulos
Drones, vol. 6, 2022. Pdf | |
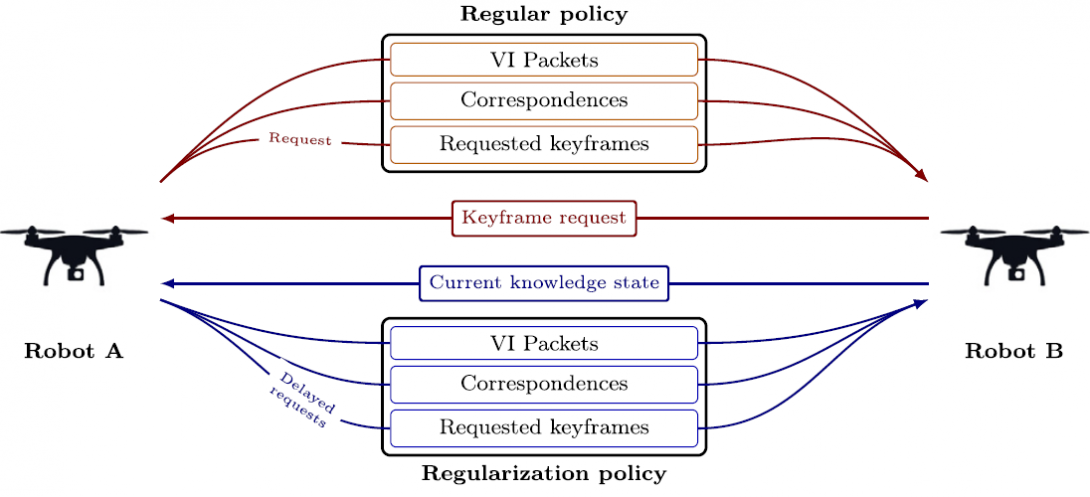
| Sharing visual-inertial data for collaborative decentralized simultaneous localization and mappingR. Dubois, A. Eudes, V. Frémont
Robotics and Autonomous Systems, vol. 148, 2022. Pdf | |
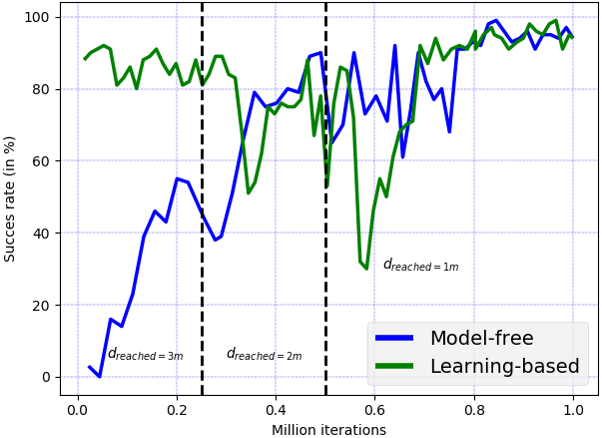
| Learning-based vs Model-free Adaptive Control of a MAV under Wind GustT. Chaffre, J. Moras, A. Chan-Hon-Tong, J. Marzat, K. Sammut, G. Le Chenadec, B. Clement
Springer Lecture Notes in Electrical Engineering, Informatics in Control, Automation and Robotics, 2022. Pdf | |
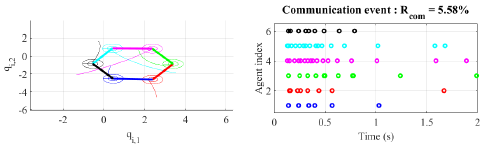
| Distributed Event-Triggered Formation Control of Multi-Agent Systems in Presence of Packet LossesC. Viel, M. Kieffer, H. Piet-Lahanier, S. Bertrand
Automatica, vol. 141, 2022. Pdf | 2022 - Conference papers | |
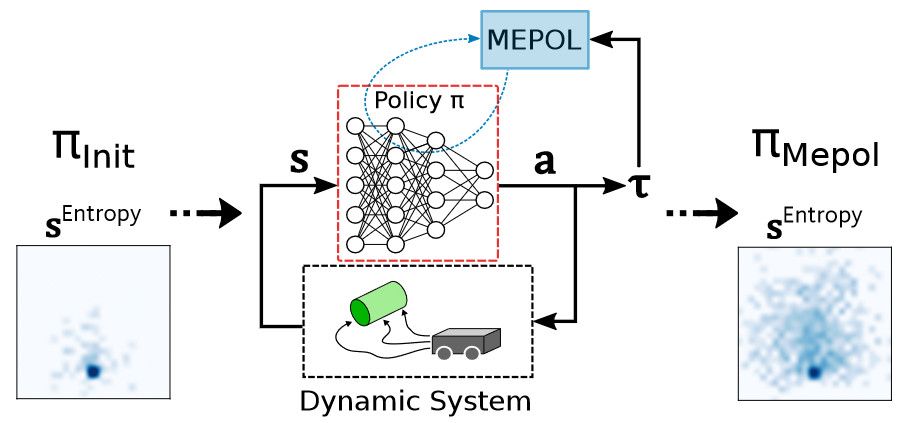
| Towards generic object property estimation using Unsupervised Reinforcement LearningM. Chareyre, P. Fournier, J. Moras, Y. Mezouar, J.-M. Bourinet
IEEE IROS Workshop on Mobile Manipulation and Embodied Intelligence (MOMA): Challenges and Opportunities, 2022. Pdf | |
| Consensus of Open Multi-agent Systems over Dynamic Undirected Graphs with Preserved Connectivity and Collision AvoidanceE. Restrepo, A. Loria, I. Sarras, J. Marzat
IEEE CDC, Cancun, Mexico, 2022. Pdf | |
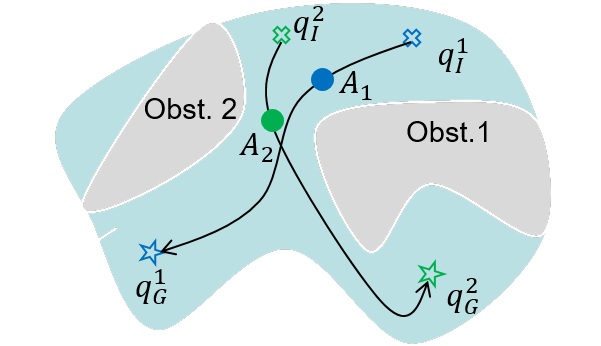
| A Comparison of Two Decoupled Methods for Simultaneous Multiple Robots Path PlanningB. Bouvier, J. Marzat
16th International Symposium on Distributed Autonomous Robotic Systems (DARS), Montbéliard, France, 2022. Pdf | |
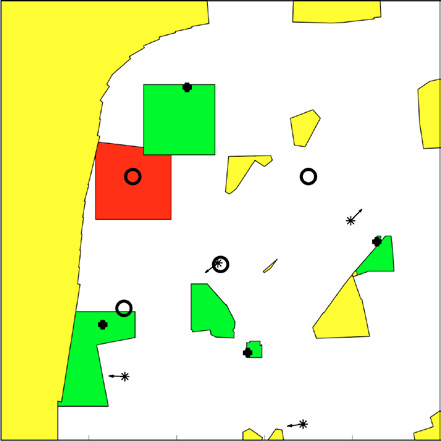
| Safe Distributed Control for Human-Multi-Robot Swarming using Voronoi PartioningS. Bertrand, A. Eudes, J. Marzat, I. Sarras
IROS Workshop on Human-Multi-Robot Systems: Challenges for Real World Applications, 2022. Pdf | |
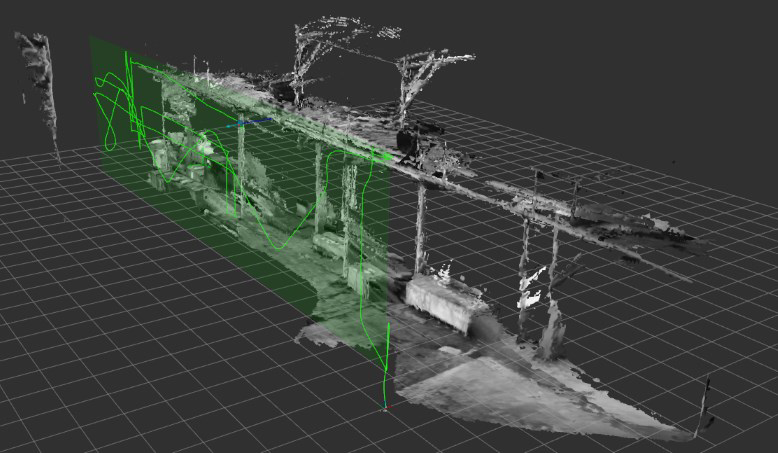
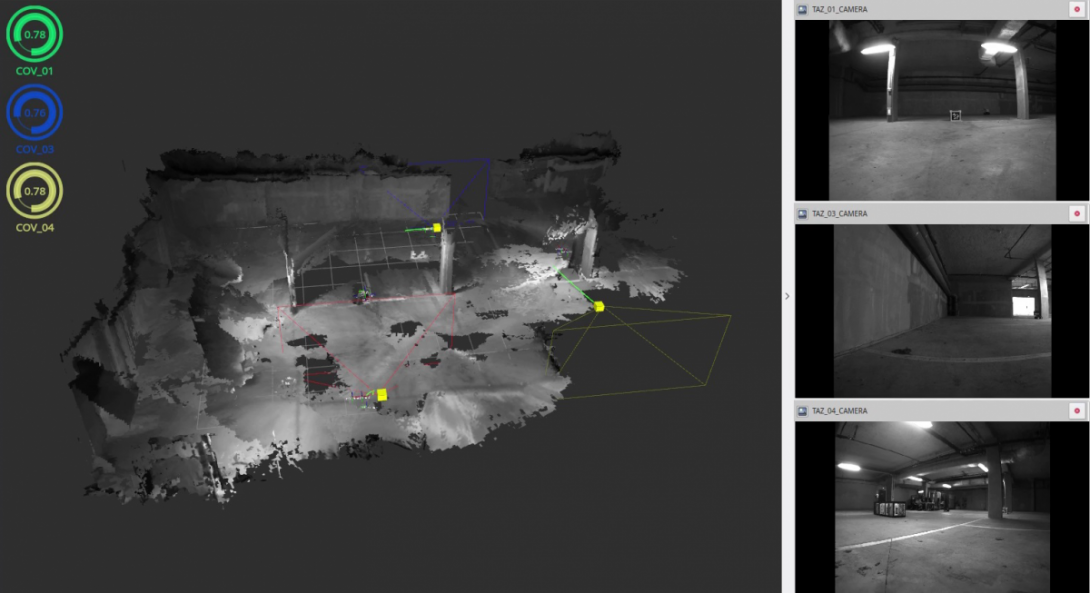
| Online Localisation and Colored Mesh Reconstruction Architecture for 3D Visual Feedback in Robotic Exploration MissionsQ. Serdel, C. Grand, J. Marzat, J. Moras
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. Pdf | |
| Path Planning Incorporating Semantic Information for Autonomous Robot NavigationS. Achat, J. Marzat, J. Moras
International Conference on Informatics in Control, Automation and Robotics (ICINCO), Lisbon, Portugal, 2022. Pdf | |
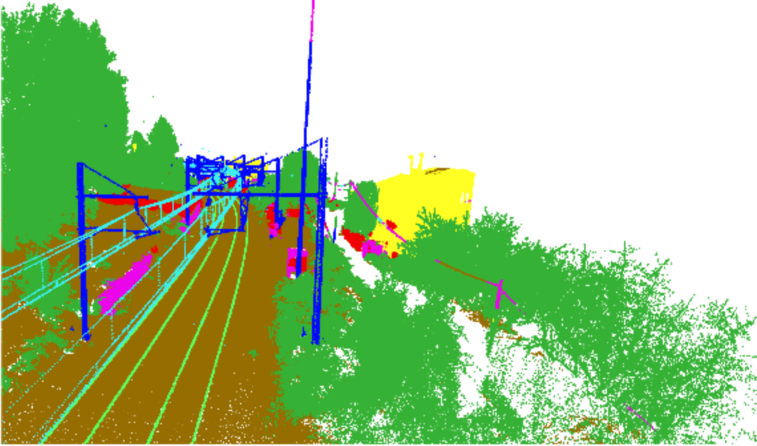
| Railway Lidar Semantic Segmentation With Axially Symmetrical Convolutional LearningA. Manier, J. Moras, J.-C. Michelin, H. Piet-Lahanier
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2022. Pdf | |
| Robust Rendezvous Control of UAVs with Collision Avoidance and Connectivity MaintenanceE. Restrepo, A. Loria, I. Sarras, J. Marzat
American Control Conference, 2022. Pdf | |
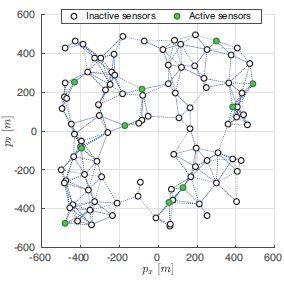
| Multi-Vehicle System Localization by Distributed Moving Horizon Estimation over a Sensor Network with Sporadic MeasurementsA. Venturino, S. Bertrand, C. Stoica Maniu, T. Alamo, E. F. Camacho
IEEE Conference on Control Technology and Applications, 2022. Pdf | |
| Risk-Aware Guidance of a Fixed-Wing UAV using Neural Network Model Predictive ControlP. Bérard, S. Bertrand, B. Levasseur
International Conference on Unmanned Aircraft Systems, 2022. Pdf | 2021 - Journal papers | |
| Bounded-error target localization and tracking using a fleet of UAVsJ. Ibenthal, M. Kieffer, L. Meyer, H. Piet-Lahanier, S. Reynaud
Automatica, vol. 132, 2021. Pdf | |
| Edge-based Strict Lyapunov Functions for Consensus with Connectivity Preservation over Directed GraphsE. Restrepo, A. Loria, I. Sarras, J. Marzat
Automatica, vol. 132, 2021. Pdf | |
| Wireless Sensor Network for Tactical Situation AssessmentB. Pannetier, J. Dezert, J. Moras, R. Levy
IEEE Sensors Journal, 2021. Pdf | |
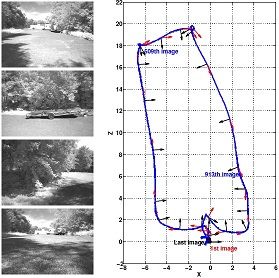
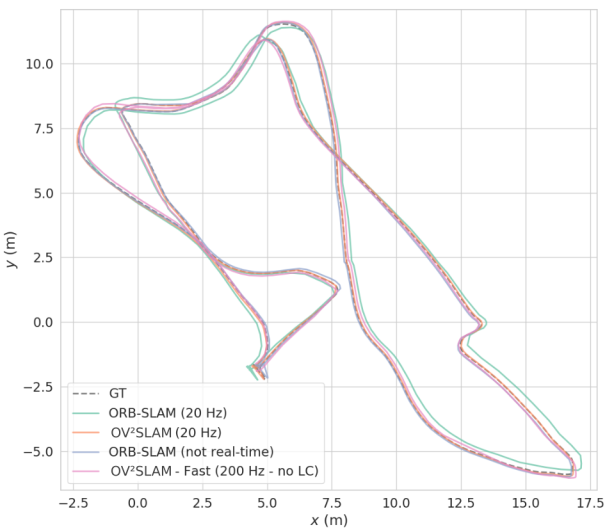
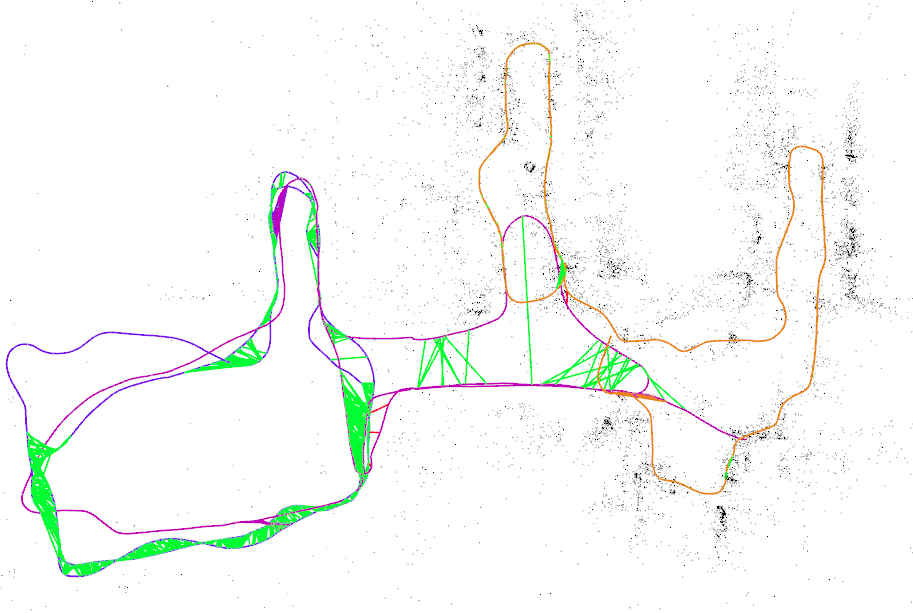
| OV²SLAM: A Fully Online and Versatile Visual SLAM for Real-Time ApplicationsM. Ferrera, A. Eudes, J. Moras, M. Sanfourche, G. Le Besnerais
IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1399-1406, 2021. Pdf | |
| Distributed Moving Horizon State Estimation for Sensor Networks with Low Computation CapabilitiesA. Venturino, C. Stoica Maniu, S. Bertrand, T. Alamo, E. F. Camacho
System Theory, Control and Computing Journal, vol. 1, no. 1, 2021. Pdf | 2021 - Conference papers | |
| Localization of partially hidden targets using a fleet of UAVs via robust bounded-error estimationJ. Ibenthal, L. Meyer, H. Piet-Lahanier, M. Kieffer
IEEE Conference on Decision and Control, Austin, TX, USA, 2021. Pdf | |
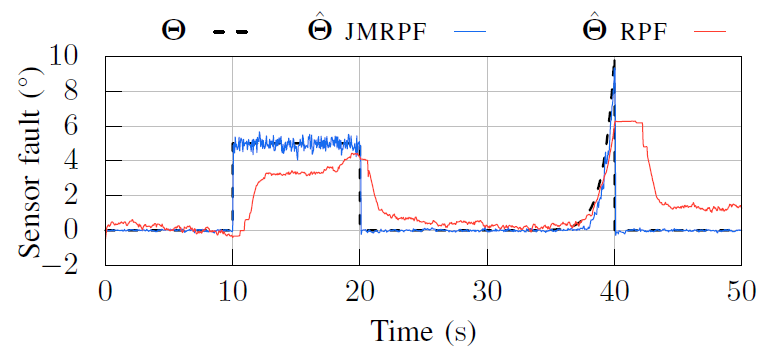
| Nonlinear Estimation of Sensor Faults With Unknown Dynamics for a Fixed Wing Unmanned Aerial VehicleE. Iglesis, N. Horri, K. Dahia, J. Brusey, H. Piet-Lahanier
IEEE International Conference on Unmanned Aircraft Systems (ICUAS), 2021. Pdf | |
| Teaching by Practice the Basis of Consensus for Multi-Agent SystemsS. Bertrand, C. Stoica Maniu, C. Vlad
IFAC Workshop on Aerospace Control Education, 2021. Pdf | |
| Distributed full-consensus control of multi-robot systems with range and field-of-view constraintsE. Restrepo, A. Loria, I. Sarras, J. Marzat
IEEE International Conference on Robotics and Automation, 2021. Pdf | |
| A New l-step Neighborhood Distributed Moving Horizon EstimatorA. Venturino, S. Bertrand, C. Stoica Maniu, T. Alamo, E. F. Camacho
IEEE Conference on Decision and Control, 2022. Pdf | 2021 - PhD Theses | |
| Coordination control of autonomous robotic multi-agent systems under constraintsE. Restrepo Pdf | |
| Partage d’informations visuelles et inertielles pour la cartographie et la localisation simultanées multi-robot décentraliséesR. Dubois Pdf | 2020 - Conference papers | |
| Dense Decentralized Multi-robot SLAM based on locally consistent TSDF submapsR. Dubois, A. Eudes, J. Moras, V. Frémont
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. Pdf | |
| Target search and tracking using a fleet of UAVs in presence of decoys and obstaclesJ. Ibenthal, L. Meyer, H. Piet-Lahanier, M. Kieffer
59th IEEE Conference on Decision and Control (CDC), 2020. Pdf | |
| Distributed moving horizon estimation with pre-estimating observerA. Venturino, S. Bertrand, C. S. Maniu, T. Alamo, E. F. Camacho
24rd International Conference on System Theory, Control and Computing, 2020. [Best paper award] Pdf | |
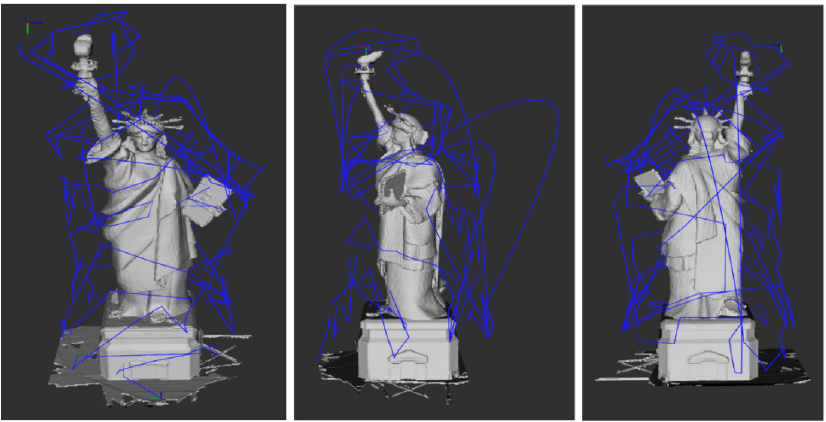
| Next-Best-View Planning for surface reconstruction of large-scale 3D environments with a fleet of UAVsG. Hardouin, F. Morbidi, J. Moras, J. Marzat, E.M. Mouaddib
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. Pdf | |
| Voronoi-based Geometric Distributed Fleet Control of a Multi-Robot SystemS. Bertrand, I. Sarras, A. Eudes, J. Marzat
16th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2020. Pdf | |
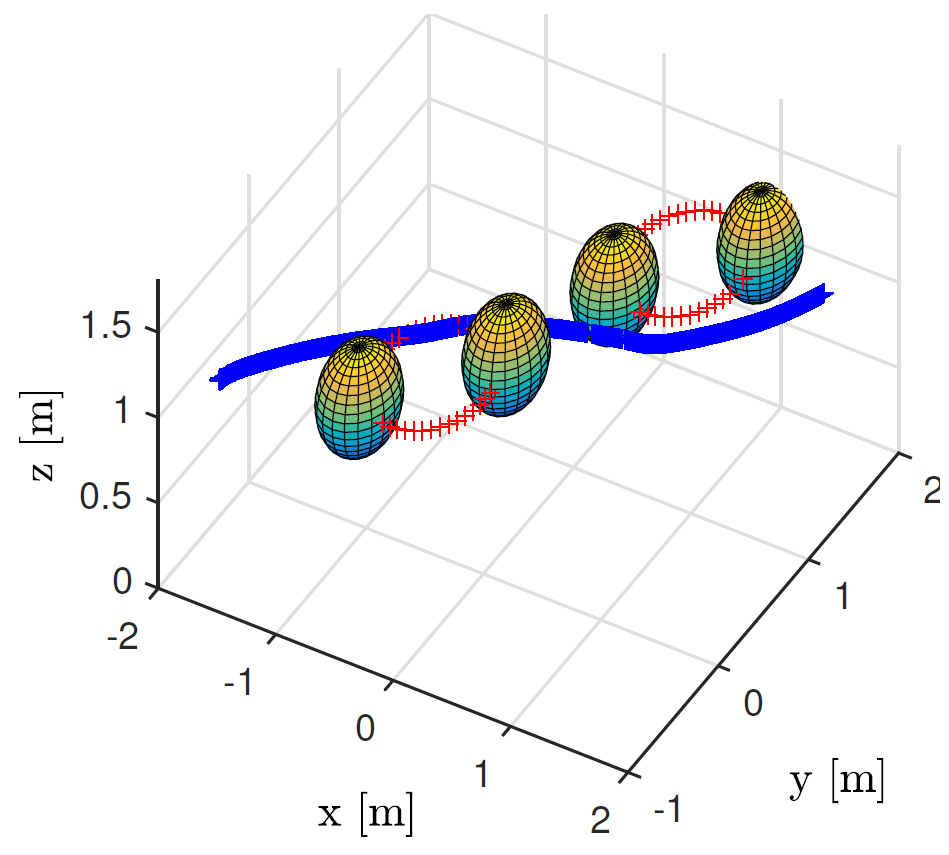
| MAV tele-operation constrained on virtual surfaces for inspection of infrastructuresF. Dietrich, J. Marzat, M. Sanfourche, S. Bertrand, A. Bernard-Brunel, A. Eudes
25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), 2020. Pdf | |
| AirMuseum: a heterogeneous multi-robot dataset for stereo-visual and inertial Simultaneous Localization And MappingR. Dubois, A. Eudes, V. Frémont
IEEE International Conference on Multisensor Fusion and Integration, 2020. Pdf Dataset | |
| Bounded-error target localization and tracking in presence of decoys using a fleet of UAVsJ. Ibenthal, L. Meyer, M. Kieffer, H. Piet-Lahanier
IFAC (virtual) World Congress, Berlin, Germany, 2020. Pdf | |
| Surface-Driven Next-Best-View Planning for Exploration of Large-Scale 3D EnvironmentsG. Hardouin, F. Morbidi, J. Moras, J. Marzat, E.M. Mouaddib
IFAC (virtual) World Congress, Berlin, Germany, 2020. Pdf | |
| Robust Consensus and Connectivity-Maintenance under Edge-Agreement-Based Protocols for Directed Spanning Tree GraphsE. Restrepo, A. Loria, I. Sarras, J. Marzat
IFAC (virtual) World Congress, Berlin, Germany, 2020. Pdf | |
| Sim-to-Real Transfer with Incremental Environment Complexity for Reinforcement Learning of Depth-based Robot NavigationT. Chaffre, J. Moras, A. Chan-Hon-Tong, J. Marzat
ICINCO, (Lieusaint-Paris, France) online, 2020. Pdf | |
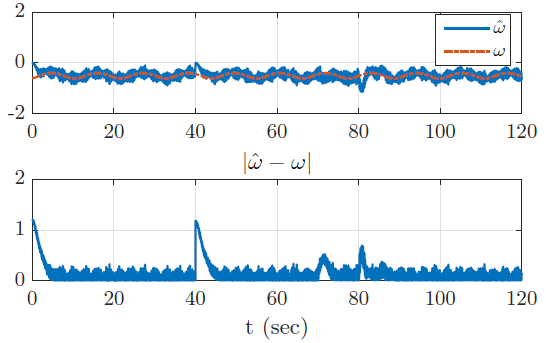
| Global exponential estimation of rigid body angular velocity directly from multiple vector measurementsI. Sarras
European Control Conference, Saint-Petersburg, Russia, 2020. Pdf | |
| Leader-follower Consensus of Unicycle-type Vehicles via Smooth Time-invariant FeedbackE. Restrepo, I. Sarras, A. Loria, J. Marzat
European Control Conference, Saint-Petersburg, Russia, 2020. Pdf | 2020 - Journal papers | |
| Stability and Robustness of edge-agreement-based Consensus Protocols for undirected Proximity GraphsE. Restrepo, A. Lorıa, I. Sarras, J. Marzat
International Journal of Control, 2020. Pdf | |
| Leader-follower Consensus of Unicycles with Communication Range Constraints via Smooth Time-invariant FeedbackE. Restrepo, A. Lorıa, I. Sarras, J. Marzat
IEEE LCSS, vol. 5(2), pp 737-742, 2020. Pdf | 2019 - Conference papers | |
| Distributed 3D TSDF Manifold Mapping for Multi-Robot SystemsT. Duhautbout, J. Moras, J. Marzat
9th European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 2019. Pdf | |
| On Data Sharing Strategy for Decentralized Collaborative Visual-Inertial Simultaneous Localization And MappingR. Dubois, A. Eudes, V. Frémont
IEEE/RSJ IROS, Macau, China, 2019. Pdf | |
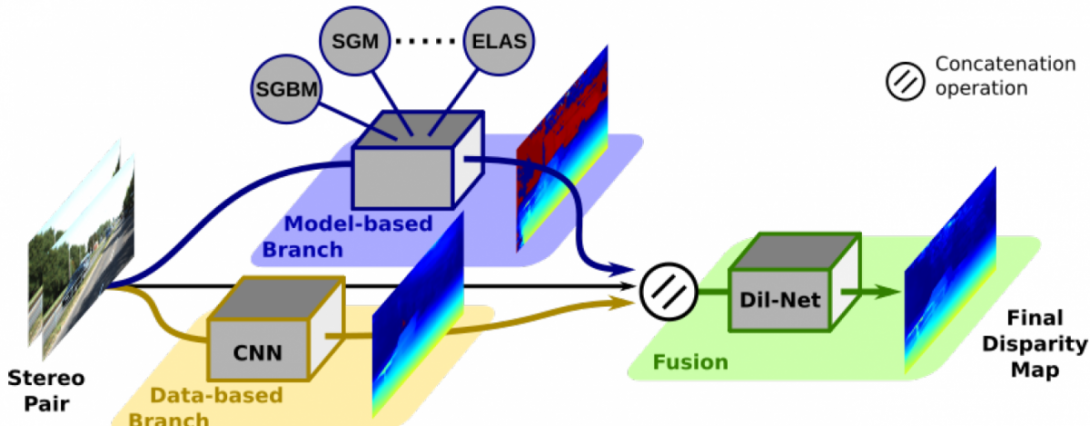
| Fast Stereo Disparity Maps Refinement By Fusion of Data-Based And Model-Based EstimationsM. Ferrera, A. Boulch, J. Moras
3DV, Québec, Canada, 2019. Pdf | |
| Cooperative guidance of a fleet of UAVs for multi-target discovery and tracking in presence of obstacles using a set membership approachL. Reboul, M. Kieffer, H. Piet-Lahanier, S. Reynaud
IFAC Symposium on Automatic Control in Aerospace, Cranfield, UK, 2019. Pdf | |
| 3D UAV Navigation with Moving-Obstacle Avoidance Using Barrier Lyapunov FunctionsE. Restrepo, I. Sarras, A. Loría, J. Marzat
IFAC Symposium on Automatic Control in Aerospace, Cranfield, UK, 2019. Pdf | |
| Distributed event-triggered consensus of multi-agent systems with measurement noise and guaranteed interval boundsG. Hardouin, S. Bertrand, H. Piet-Lahanier
8th IFAC Workshop on Distributed Estimation and Control in Networked Systems, Chicago, IL, USA, 2019. Pdf | |
| Autonomous Unmanned Heterogeneous Vehicles for Persistent MonitoringH.Y. Shin, A. Tsourdos, V. Lappas, A. Ampatzoglou, V. Kostopoulos, S. Bertrand, J. Marzat, H. Piet-Lahanier, D. Lindgren, M. Detratti
AIAA SciTech Forum, San Diego, California, USA, 2019. Pdf | |
| Design and flight experiments of a Tube-Based Model Predictive Controller for the AR.Drone 2.0 quadrotorN. Michel, S. Bertrand, S. Olaru, G. Valmorbida, D. Dumur
1st IFAC Workshop on Robot Control, Daejeon, South Korea, 2019. Pdf | |
| Exploiting Physical Contacts for Robustness Improvement of a Dot-Painting Mission by a Micro Air VehicleT. Chaffre, K. Tudal, S. Bertrand, L. Prevost
ICINCO, Prague, Czech Republic, 2019. Pdf | |
| Magneto-Visual-Inertial Dead-Reckoning: Improving Estimation Consistency by InvarianceD. Caruso, A. Eudes, M. Sanfourche, D. Vissière, G. Le Besnerais
IEEE 58th Conference on Decision and Control (CDC), Nice, France, 2019. Pdf | |
| Modernizing Teaching through Experimentation on UAVs FormationsC. Stoica Maniu, T. Vlad, T. Chevet, G. Rousseau, S. Bertrand, S. Olaru
12th IFAC Symposium on Advances in Control Education, Philadelphia, USA, 2019. Pdf | |
| Integrating Experimental Data Sets and Simulation Codes for Students into a MOOC on Aerial RoboticsS. Bertrand, J. Marzat, G. Le Besnerais, A. Manzanera, C. Stoica Maniu, M. Makarov
12th IFAC Symposium on Advances in Control Education, Philadelphia, USA, 2019. Pdf | |
| Évaluation de deux algorithmes de partage de données en Cartographie et Localisation Simultanées visuelles-inertielles multi-robot et décentraliséesR. Dubois, A. Eudes, V. Frémont
ORASIS, Saint-Dié-des-Vosges, France, 2019. Pdf | |
| ROS-based tools for managing fleets of autonomous robotsA. Bernard-Brunel, A. Eudes, J. Marzat
ROSConFR, Paris, France, 2019. | 2019 - Journal papers | |
| AQUALOC: An underwater dataset for visual–inertial–pressure localizationM. Ferrera, J. Moras, P. Trouvé-Peloux, V. Creuze
The International Journal of Robotics Research, 2019. Pdf | |
| Real-Time Monocular Visual Odometry for Turbid and Dynamic Underwater EnvironmentsM. Ferrera, J. Moras, P. Trouvé-Peloux, V. Creuze
Sensors, 2019. Pdf | |
| Distributed event-triggered control strategies for multi-agent formation stabilization and trackingC. Viel, S. Bertrand, M. Kieffer, H. Piet-Lahanier
Automatica, 2019. Pdf | 2019 - PhD Thesis | |
| Monocular Visual-Inertial-Pressure Fusion for Underwater Localization and 3D MappingM. Ferrera Pdf | 2018 - Conference papers | |
| DroMOOC: a Massive Open Online Course on Drones and Aerial Multi Robot SystemsS. Bertrand, J. Marzat, C. Stoica Maniu, M. Makarov, D. Filliat, A. Manzanera
UKACC 12th International Conference on Control, Sheffield, UK, 2018 Pdf | |
| Performance Evaluation of a Moving Horizon Estimator for Multi-Rate Sensor Fusion with Time-Delayed MeasurementsR. Dubois, S. Bertrand, A. Eudes
22nd International Conference on System Theory, Control and Computing, Sinaia, Romania, 2018 Pdf | |
| Collision-free MAV tele-operation along a reference trajectory in indoor cluttered environmentJ. Marzat, A. Eudes, A. Bernard-Brunel, M. Sanfourche, S. Bertrand
IROS Workshop Vision-based Drones: What's Next?, Madrid, Spain, 2018. Pdf | |
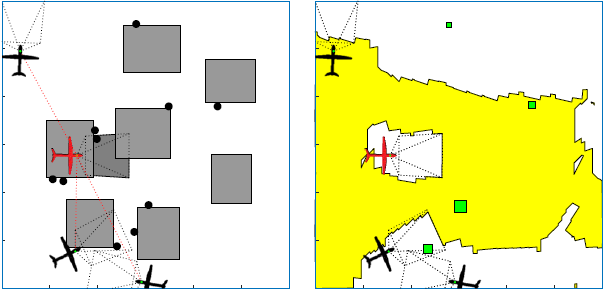
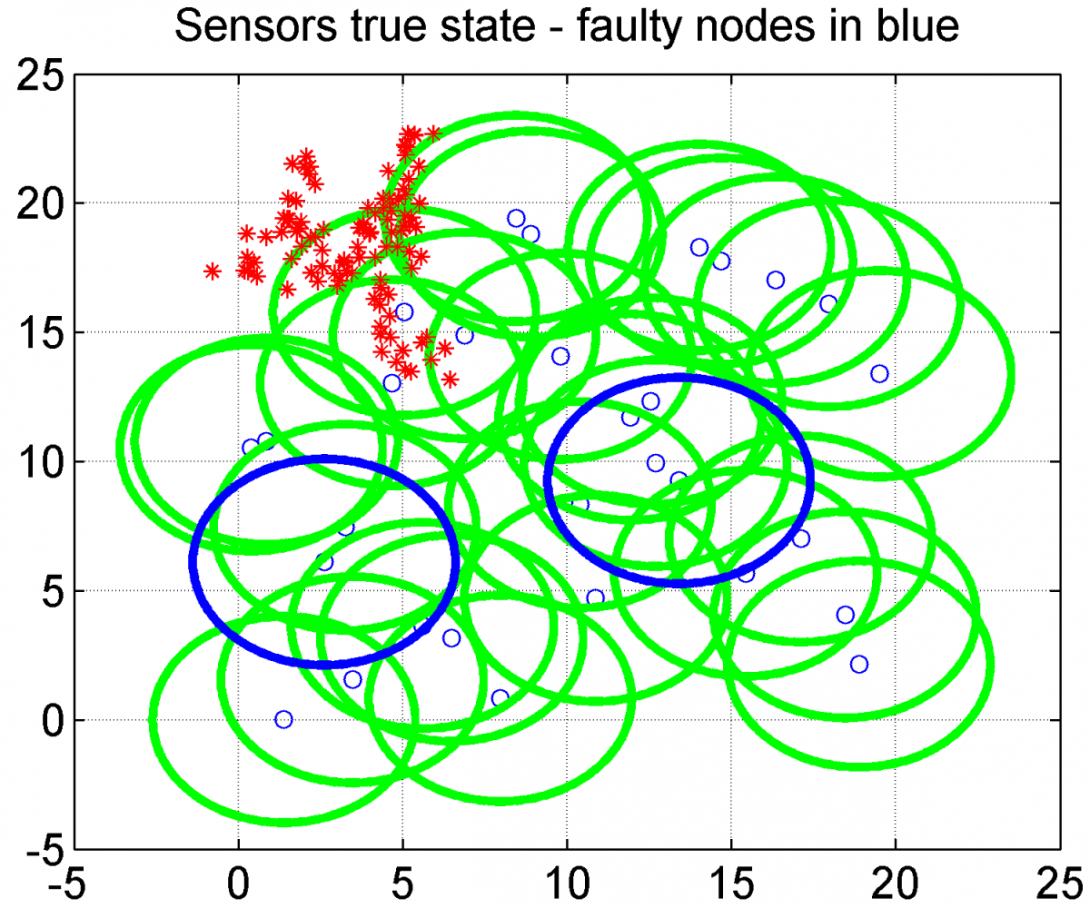
| Cooperative fault detection and isolation in a surveillance sensor network: a case study J. Marzat, H. Piet-Lahanier, S. Bertrand
IFAC Safeprocess, Warsaw, Poland 2018. Pdf | 2018 - Journal papers | |
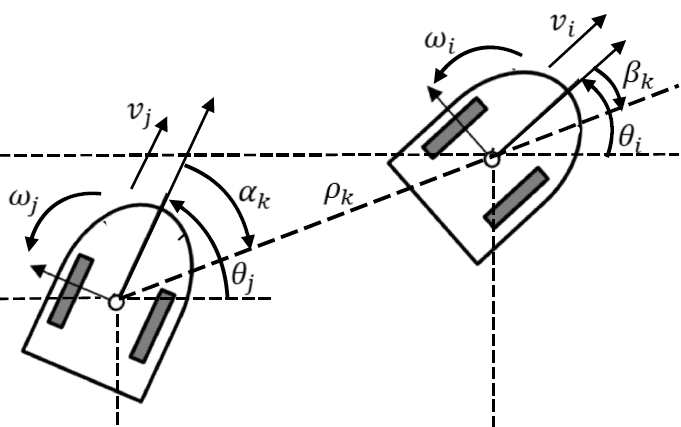
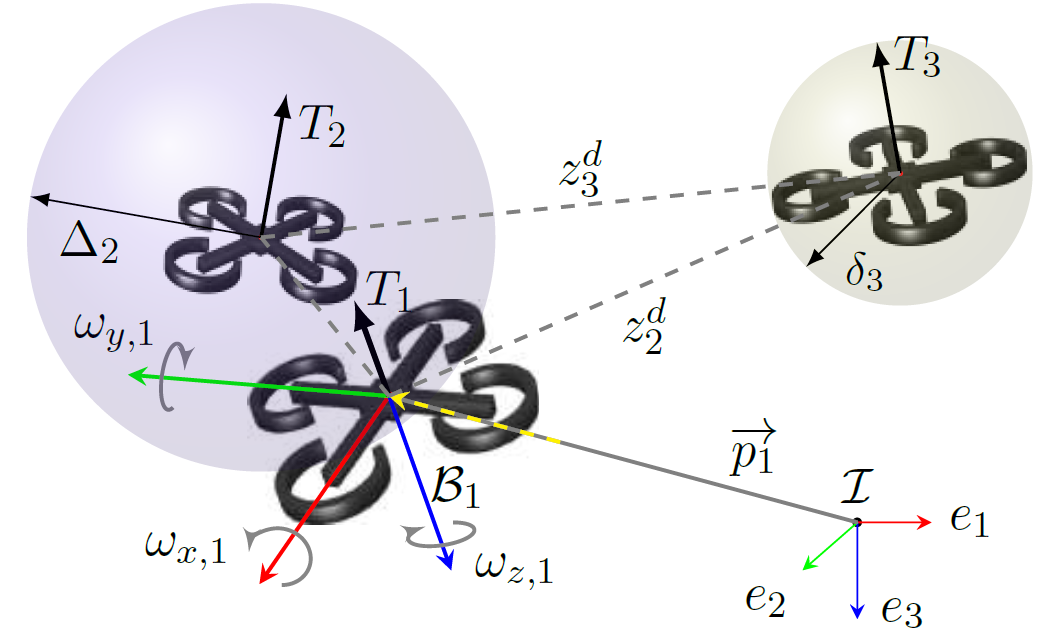
| Collaborative multi-MAV localization and target tracking in GPS-denied environment from range-velocity measurementsI. Sarras, J. Marzat, S. Bertrand, H. Piet-Lahanier
International Journal of Micro-Air Vehicles, Vol. 10(2), pp. 225-239, 2018. Pdf | |
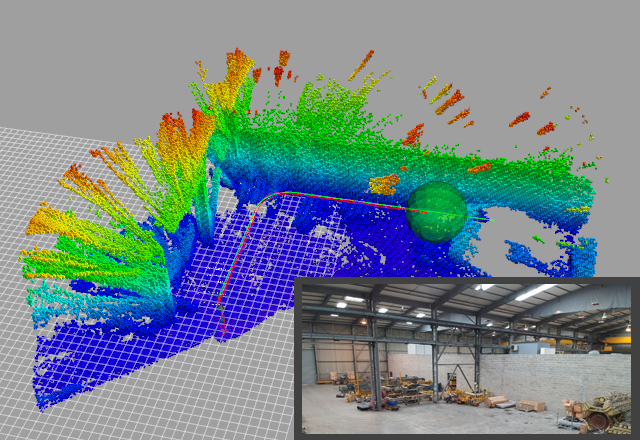
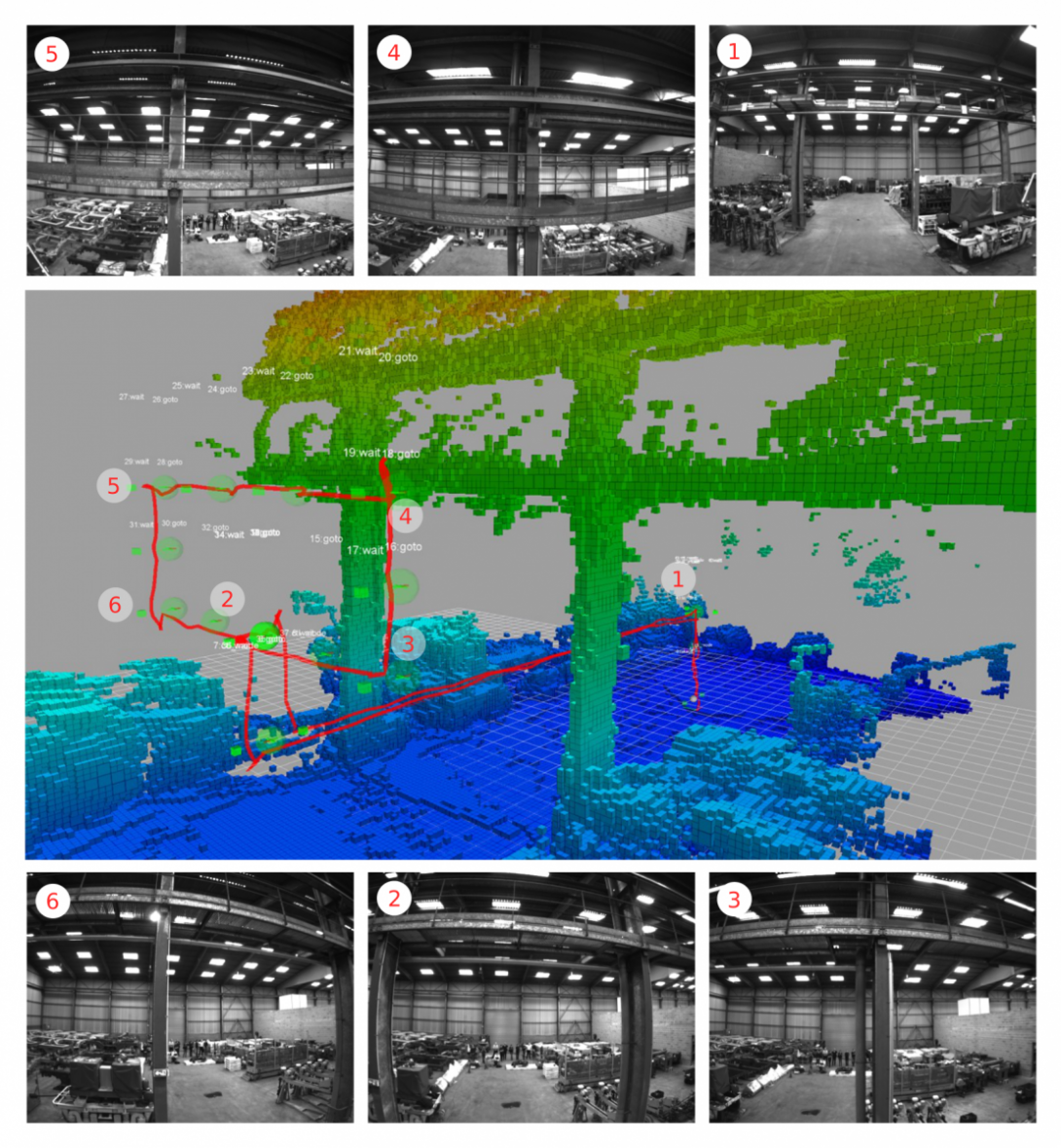
| Autonomous and Safe Inspection of an Industrial Warehouse by a Multi-rotor MAVA. Eudes, J. Marzat, M. Sanfourche, J. Moras, S. Bertrand
Springer Proceedings in Advanced Robotics, Field and Service Robotics, Vol. 5, pp. 221-235, 2018. Pdf | 2018 - PhD Theses | |
| State estimation and trajectory planning using box particle kernelsN. Merlinge Pdf | |
| Amélioration des méthodes de navigation vision-inertiel par exploitation des perturbations magnétiques stationnaires de l’environnementD. Caruso Pdf | 2017 - Conference papers | |
| Detection, Estimation and Avoidance of Mobile Objects using Stereo-Vision and Model Predictive ControlH. Roggeman, J. Marzat, M. Derome, M. Sanfourche, A. Eudes, G. Le Besnerais
ICCV International Workshop on Computer Vision for UAVs, Venice, Italy, 2017. Pdf | |
| Reactive MPC for Autonomous MAV Navigation in Indoor Cluttered Environments: Flight ExperimentsJ. Marzat, S. Bertrand, A. Eudes, M. Sanfourche, J. Moras
20th IFAC World Congress, Toulouse, France, 2017. Pdf | |
| Autonomous Exploration with Prediction of the Quality of Vision-based LocalizationH. Roggeman, J. Marzat, A. Bernard-Brunel, G. Le Besnerais
20th IFAC World Congress, Toulouse, France, 2017. Pdf | |
| Distributed Event-triggered Control for Multi-Agent Formation StabilizationC. Viel, S. Bertrand, M. Kieffer, H. Piet-Lahanier
20th IFAC World Congress, Toulouse, France, 2017. Pdf | |
| Model Predictive Control for Autonomous Navigation using Embedded GPUD. K. Phung, B. Hérissé, J. Marzat, S. Bertrand
20th IFAC World Congress, Toulouse, France, 2017. Pdf | |
| Design and Parameter Tuning of a Robust Model Predictive Controller for UAVsN. Michel, S. Bertrand, G. Valmorbida, S. Olaru, D. Dumur
20th IFAC World Congress - Open Invited Track for Young Researchers (sel. on extended abstract), Toulouse, France, 2017. Pdf | |
| Collaborative Multi-Vehicle Localization with respect to Static/Dynamic Target from Range and Velocity MeasurementsI. Sarras, J. Marzat, S. Bertrand, H. Piet-Lahanier
International Conference on Unmanned Aircraft Systems, Miami, USA, 2017. Pdf | 2017 - Journal paper | |
| New State Estimators and Communication Protocol for Distributed Event-Triggered
Consensus of Linear Multi-Agent Systems with Bounded PerturbationsC. Viel, S. Bertrand, M. Kieffer, H. Piet-Lahanier
IET Control Theory & Applications, 2017. Pdf | 2017 - PhD Theses | |
| Amélioration de Performance de la Navigation Basée Vision pour la Robotique Autonome : une Approche par Couplage Vision/CommandeH. Roggeman Pdf | |
| Control Laws and State Estimators Design for Multi-Agent Systems with Reduction of Communications by Event-Triggered ApproachC. Viel Pdf |
|