
Please contact Jean-Marc Biannic for any feedback (biannic@onera.fr).
Saturations (magnitude, rate, acceleration) are always present in control systems and must be taken into account either a priori or a posteriori to avoid loss of performance and possibly destabilization. This is classicaly achieved by an anti-windup structure as shown on, the figure below.
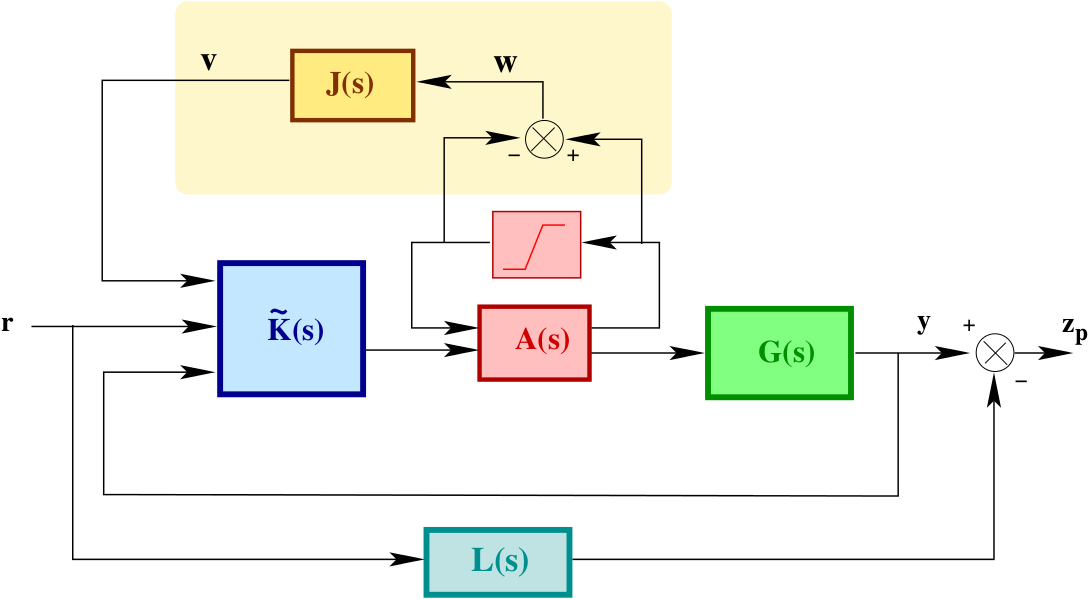
The anti-windup compensator J(s) may be computed in several ways (see [1] for details):
- stability domain extension: the anti-windup gain is optimized so as to enlarge the stability domain against saturations, regardless of the performance level.
- performance enhancement: for a given stability domain, the anti-windup is tuned so that the nominal performance is preserved "as long as possible". This situation is clearly illustrated by the above scheme. The objective consists of minimizing the error signal between the saturated closed-loop output and a nominal linear reference model output.
The tools included in the SAW library permit to set (with the Simulink interface) and solve easily the above two problems with static, fixed-order and full-order compensators. The main three routines of the library are:
- satsan: saturated systems stability/performance analyis by an LMI-based Lyapunov approach
- awlsyn:anti-windup design by a Lyapunov approach
- awhsyn:anti-windup design by a multi-objective design approach (available soon with version v2 of the library)
The best way to start with the tools is to run the examples contained in a specific folder of the package.
License agreement, disclaimer
- You are free to use any of the files for personal or academic use. The express permission of the authors is required for any commercial use.
- You can redistribute the files without modification provided that it is for a non commercial purpose. Redistribution in any commercial form including CD-ROM or any other media is hereby forbidden, unless with the express written permission of the authors. Any of your software developments related to this download will be available under similar license conditions.
- Neither the authors nor ONERA accept any responsibility or liability with regard to this software that is licensed on an "as is" basis. There will be no duty on authors or ONERA to correct any errors or defects in the software.
Download the SAW Library
The current version of the SAW Library is based on three main routines and a Simulink interface which may be used to set up easily the anti-windup design problem. Click here to download the package.
References
[1] J-M. Biannic, S. Tarbouriech. Optimization and implementation of dynamic anti-windup compensators in aircraft control systems with multiple saturations. Control Engineering Practice. 17(6) : 703-713, June 2009.
[2] C. Roos, J-M. Biannic. A convex characterization of dynamically-constrained anti-windup controllers. Automatica. 44(9) : 2449-2452, September 2008.
[3] G. Ferreres, J-M. Biannic. Convex design of a robust anti-windup controller for an LFT model. IEEE Transactions on Automatic Control. 52(11) : 2173-2177, November 2007.
[4] J-M. Biannic and P. Apkarian. Anti-windup design via nonsmooth multi-objective H∞ optimization. In the proceedings of the American Control Conference, pp. 4457-4462. San Francisco, CA, USA. June 29 - July 01, 2011.