
A Civilian Aircraft Landing Challenge
From the early developments of the A320 program, thanks to Fly-By-Wire systems, Automatic Control techniques have significantly contributed to improve flight performance and safety of civilian aircraft. Today, most of the flight segments can be managed quite efficiently by the autopilot. However, the final approach and landing phases still remain critical in poor visibility and strong wind conditions. Based on a realistic nonlinear model of a civil transport aircraft in full configuration, the objective of the proposed challenge is to design an autopilot system to enable a correct landing despite parametric variations and maximized cross wind conditions. Based on a realistic and highly adaptable aircraft model (whose characteristics are close to those of an A330) implemented in a fully open SIMULINK file, this challenge is jointly proposed by ONERA (Jean-Marc Biannic) and AIRBUS (Josep Boada-Bauxell). A complete description of the model and the associated challenge can be found from the paper below:
The associated benchmark model is briefly described below and can be freely downloaded (and used in any non-commercial context) from a link provided at the bottom of this page. However, the authors require to be informed for any usage of the model and correctly referenced in any publication and report (see the References section at the bottom of the page).
Aircraft Benchmark Model
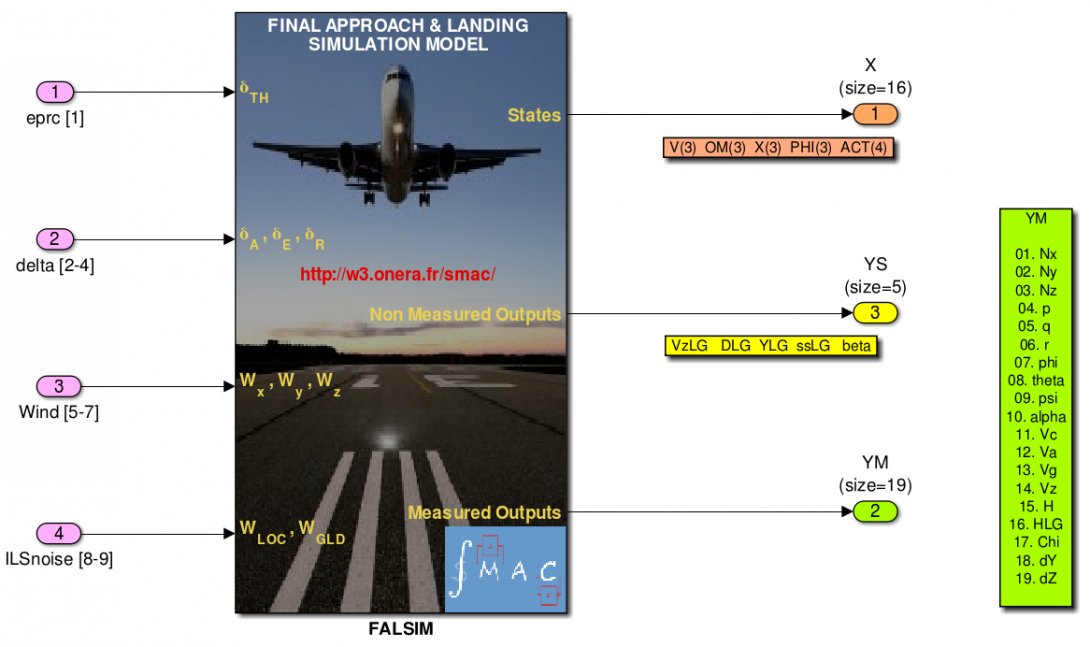
The benchmark model is representative of a large, twin-engined, transport aircraft whose total mass may vary between 120t and 180t. A general view of the model is shown below.
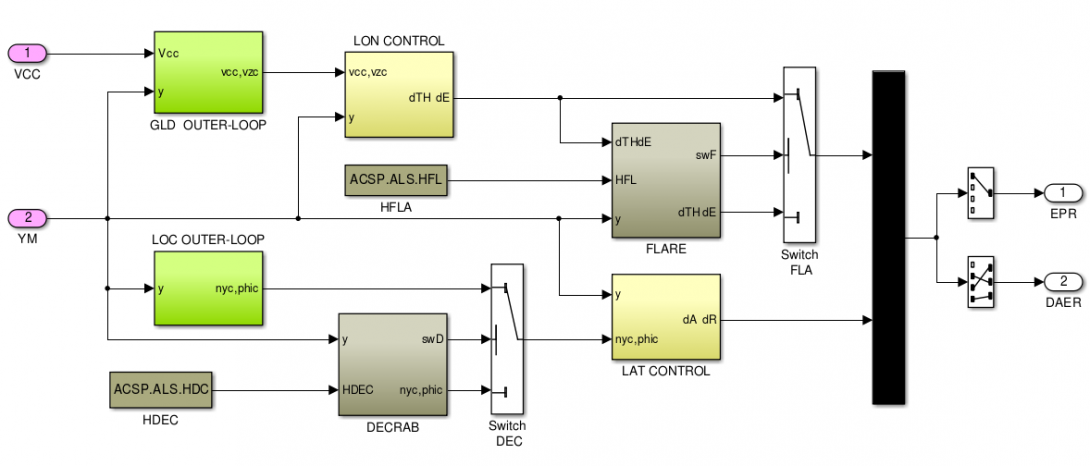
The objective is to design robust controllers to ensure smooth and precise landings despite many uncertainties and external perturbations (turbulences, windshear, ground effect). The general structure of the control laws is visualized in the following figures. A particular attention will be devoted to Flare and Align phases in this project.
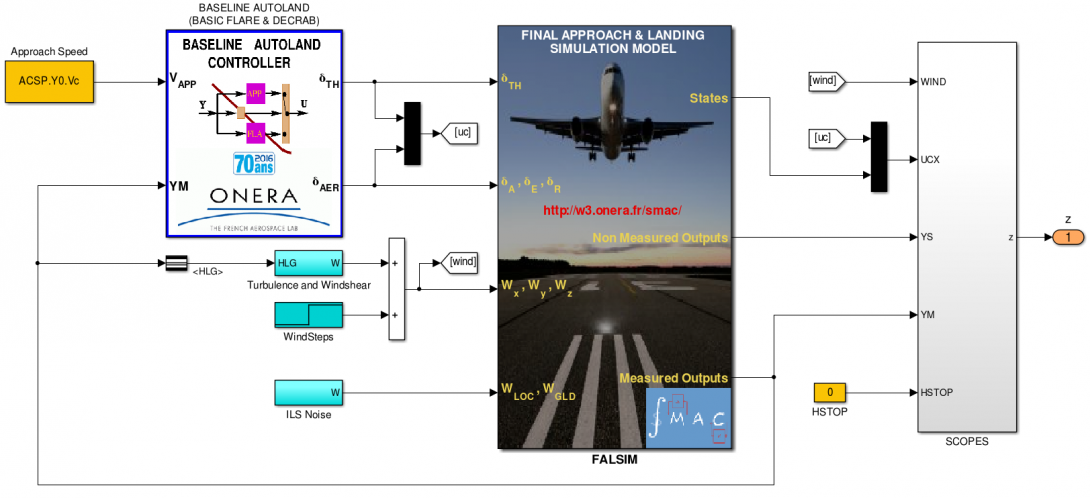
The above Simulink diagrams (respectively named ACS.slx and ALS.slx) as well as a documentation (CACbench.pdf), triming and simulation routines (including Monte-carlo runs) can be extracted from the file CALC.zip file which is available for download from a link at the bottom of the page. Before downloading this file and using the benchmark, please read the disclaimer below. The benchmark comes with a basic version of an autoland control system which has been designed for nominal speeds and low wind conditions only.
License agreement, disclaimer
- You are free to use any of the files of the CALC package for personal or academic use. The express permission of the authors is required for any commercial use.
- You can redistribute the CALC package of the SMAC Toolbox and its manual without modification provided that it is for a non commercial purpose. Redistribution in any commercial form including CD-ROM or any other media is hereby forbidden, unless with the express written permission of the authors. Any of your software developments related to this download will be available under similar license conditions.
- Neither the authors nor ONERA accept any responsibility or liability with regard to this software that is licensed on an "as is" basis. There will be no duty on authors or ONERA to correct any errors or defects in the software.
Download the benchmark
The benchmark package including a rough baseline controller may be downloaded here When using this benchmark to test and illustrate your own design methods in any non-commercial context, please mention the SMAC project and refer to the following paper:
References
| [1] | J-M. Biannic and C. Roos. "Flare control law design via multi-channel Hinfinity synthesis: Illustration on a freely available nonlinear aircraft benchmark ", in Proceedings of the American Control Conference, Chicago, IL, USA, July 2015. |
| [2] | J-M. Biannic and J. Boada-Bauxell. "A Civilian Aircraft Landing Challenge", On-line available from the aerospace benchmark section of the SMAC Toolbox, http://w3.onera.fr/smac/, Toulouse 2016. |
Download a new AutoLand Controller for the benchmark !
This autoland system has been developed by Julian Theis, Daniel Ossmann and Harald Pfifer for the IFAC17 Challenge and is described in the following paper which must be referenced if you use this controller for the purpose of comparison with your own design:
| [3] | J. Theis, D. Ossmann and H. Pfiffer. "Robust Autopilot Design for Crosswind Landing", in Proceedings of the IFAC World Congress, Toulouse, France, July 2017. |
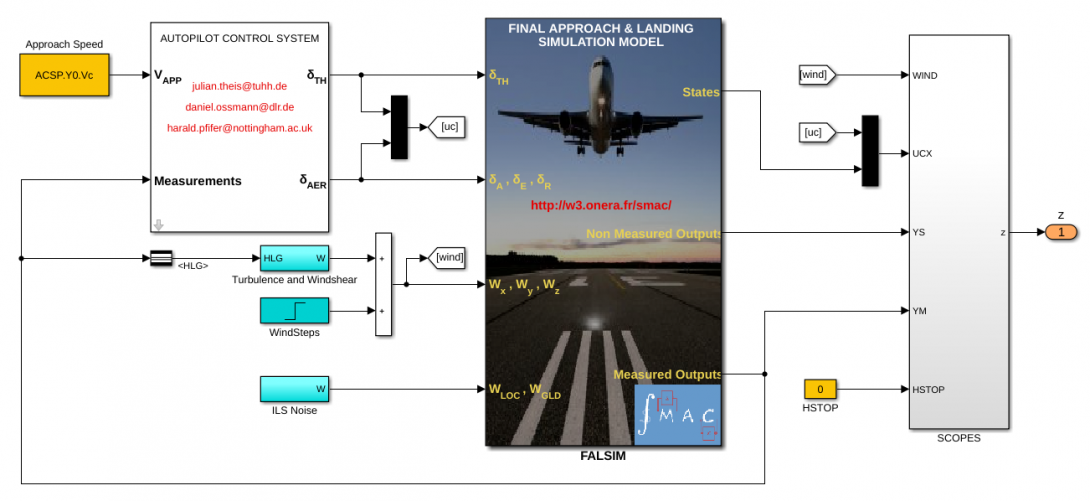
The autoland package may be downloaded here. For any question, do not hesitate to contact the authors: julian.theis@tuhh.de daniel.ossmann@dlr.de harald.pfifer@nottingham.ac.uk ONERA is grateful to the authors who provided their solution and allowed us to make it available here. This great contribution considerably improves the quality of the benchmark. Please also note the following contribution which describes an alternative solution focused on the flare design and was also presented at the IFAC World Congress:
| [4] | D. Navarro-Tapia, S. Pedro, A. Iannelli, A. Marcos. "Robust Flare Control Design Using Structured H-Infinity Synthesis: A Civilian Aircraft Landing Challenge", in Proceedings of the IFAC World Congress, Toulouse, France, July 2017. |
History
First version of the Aircraft Benchmark : v1.0 released on June 24th 2015.
Second version of the Aircraft Benchmark : v2.0 released on April 4th 2016.
Third version of the Aircraft Benchmark : v3.0 released on September, 30th 2016.
Fifth version of the Aircraft Benchmark : v5 released on October, 10th 2016.
Sixth version of the Aircraft Benchmark : v6 released on October, 24th 2016.
Current version of the Aircraft Benchmark : v7 released on February, 7th 2017.