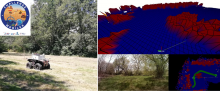
L'ONERA DTIS a été sélectionné en partenariat avec la PME bordelaise Génération Robots parmi les sept équipes participantes au Challenge MOBILEX sur la mobilité autonome des véhicules terrestres en environnement complexe. Ce challenge lancé fin 2023 et organisé conjointement par l'Agence de l’innovation de défense (AID) et l’Agence nationale de la recherche (ANR) comprend trois défis annuels de difficulté croissante qui évalueront les différentes solutions technologiques intégrées sur un démonstrateur robotisé mis à disposition de chaque équipe par la société Shark Robotics.
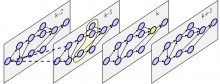
Le projet Occitoshed est un projet Région Occitanie Readynov porté par l'entreprise toulousaine Jolibrain et auquel participent Agilea et l'ONERA. L'objectif est d'utiliser des techniques d'apprentissage par renforcement pour résoudre des problèmes d'ordonnancement classiques dans le domaine de la production. Ces problèmes peuvent être des problèmes d'atelier (Job Shop Scheduling Problem - JSSP) ou des variantes contraintes par des ressources limitées (Resource Constrained Project Scheduling Problem - RCPSP) dans lesquelles la durée des activités n'est pas fixée, par exemple à cause d'aléas. Les approches étudiées s'appuient sur des Graph Neural Networks, permettant ainsi de générer des ordonnancements robustes rapidement.
ACCEOS s’intéresse à l’amélioration des performances des constellations de satellites agiles, tant du point de vue de la fréquence de revisite que de la qualité des acquisitions réalisées. Il se concentre sur la chaîne amont du système d'observation (avant le traitement des données au sol), et adresse plus précisément la planification sol et bord des satellites, la capacité de prise de vue de nuit, une prise en compte fine de la communication bord/sol, la prise en compte de la prévision de la couverture nuageuse à court et très court terme ainsi que la possibilité de simuler des constellations dans le SpaceLab.
Le projet Horizon Europe DOMINO-E vise à résoudre les principaux problèmes de disponibilité et de réactivité de l'observation de la Terre depuis l'espace. La technologie DOMINO-E permettra l'accessibilité multi-mission d'une manière évolutive et automatisée qui permettra à l'utilisateur final de traiter une variété d'actifs d'acquisition en mettant en œuvre une couche de fédération multi-mission et multi-capteur et en utilisant des algorithmes d'ordonnancement et d'optimisation. L'orchestration entre les missions patrimoniales des utilisateurs et les missions tierces est basée sur des critères de réactivité, de persistance, de précision et de coûts, tandis que l'expérience utilisateur est améliorée grâce à des assistants cognitifs.
Nos chercheurs de l'unité EDO, en collaboration avec le CRIL (Université d'Artois, CNRS), ont obtenu le prix du meilleur article dans la catégorie "Application" lors de la 30ème Conférence internationale sur les principes et pratiques de la programmation par contraintes (https://cp2024.a4cp.org/).
Le projet PARHéRo: Méthodes hybrides de planification et apprentissage pour la robotique hétérogène robuste, vise explicitement d’incrémenter les synergies entre la recherche scientifique et industrielle pour anticiper et maîtriser l’évolution des plateformes robotisées hétérogènes dans des environnements complexes,inconnus et/ou hostiles. Le bon déroulement des missions est assuré par des plateformes avec un fort degré d’autonomie, un élément central pour leur robustesse qui est obtenu à travers l’apprentissage, la planification, et la supervision de la mise en œuvre de comportements intelligents.
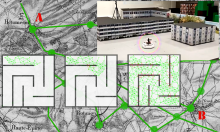
Le projet fédérateur SICICOD (Systèmes multi-robots intelligents coopératifs et interactifs pour la conduite d’opération de Défense) vise à effacer la complexité des opérations de défense multi-robots pour permettre aux opérateurs de mieux interpréter la situation et de prendre ou déléguer les bonnes décisions.