Le projet fédérateur SICICOD (Systèmes multi-robots intelligents coopératifs et interactifs pour la conduite d’opération de Défense) vise à effacer la complexité des opérations de défense multi-robots pour permettre aux opérateurs de mieux interpréter la situation et de prendre ou déléguer les bonnes décisions.
Pour répondre à cette question, nous proposons le développement d’un modèle numérique de la mission et de la situation qui permettra aux opérateurs de mieux appréhender la situation en confiance et de prendre des décisions efficaces. La construction et la maintenance d’un tel modèle nécessitera de faire appel à des techniques de captation et télédétection précises et en temps-réel, et de modes de communication adaptables au contexte opérationnel. Les traitements associés devront produire des données accessibles et interprétables par les opérateurs et les entités autonomes.
Face à la complexité des scénarios envisagés, provenant à la fois des dynamiques de la situation terrain et de la multitude des vecteurs et des points de vue, nous promouvons des techniques d’intelligence artificielle, de planification et de robotique collective, pour des prises de décisions autonomes par le système d’aide à la conduite d’opérations et par les vecteurs eux-mêmes. Ces techniques devront non seulement être efficaces, robustes aux aléas et passer à l’échelle des systèmes de plus en plus larges, mais également fournir des garanties comportementales afin que les opérateurs aient toute confiance dans les données présentées (interprétables et compréhensibles) et les décisions autonomes prises (justifiables et révisables). Il sera ainsi essentiel de mettre l’accent sur le développement d’interfaces homme-système dédiées pour installer cette confiance, de manière transverse au projet.
Description du projet
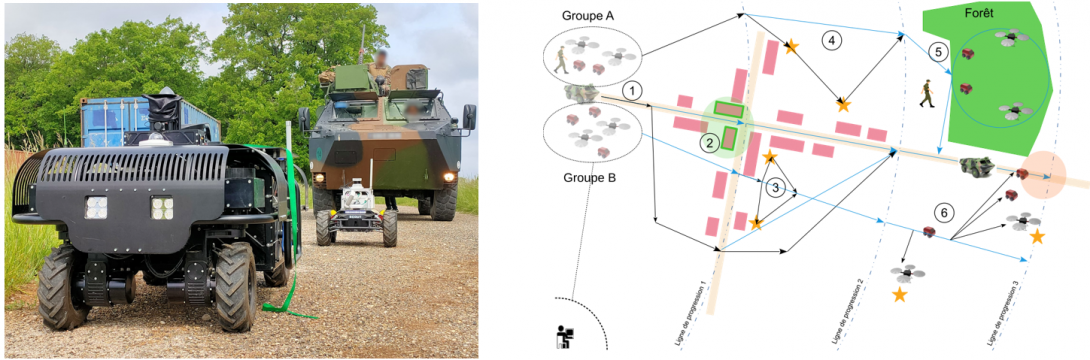
SICICOD vise à démontrer les savoir-faire de l’ONERA suivant un scénario défense réaliste soulevant des défis scientifiques ambitieux. Il s’intéresse à l’évolution d’une troupe accompagnée de ses drones sur un terrain hostile pour remplir une mission de renseignement grâce à un ensemble de drones (aériens et terrestres) en trouvant des pièges, en désactivant ceux qui le nécessitent, dans un tempo fixé (plan partiel fourni à chaque étape), en informant le poste de commandement de la situation et en réagissant aux imprévus.
Quatre axes scientifiques ont été identifié pour répondre aux enjeux du projet :
• L'axe 1 vise à étendre et développer des méthodes et outils pour assister le centre d'opération dans sa compréhension de la situation tactique et dans la prise de décision vis-à-vis des objectifs à atteindre et de l'allocation des différentes ressources.
• L’axe 2 vise à fournir au centre d'opération des éléments sémantiques identifiant les menaces dans la scène, leur dynamique et l’indice de confiance associé permettant avec le support éventuel d’un opérateur la prise de décision pour confirmer/infirmer la menace et/ou la contourner.
• L’axe 3 vise à étendre la base méthodologique et expérimentale développée dans le cadre de projets précédents sur la navigation autonome, notamment à base d’approches distribuées et en intégrant de nouveaux moyens de perception et télédétection.
• L’axe 4 vise à fournir des scénarios d’évaluation, une architecture système pour l’intégration des résultats, ainsi qu’un modèle formel de représentation permettant l’interopérabilité des résultats des différents axes.
Départements impliqués et partenaires
DOTA : Capteurs optiques, capteurs multispectraux, détection de menaces, synergie et fusion de données capteurs, traficabilité, communication optique
DPHY : Capteurs photoacoustiques, synergie et fusion de données capteurs
DTIS : Robotique collective, coordination, localisation et cartographie, modèles formels de missions, architecture logicielle, facteurs humains
Projets connexes : ANR VORTEX et NAIAD, Challenge MOBILEX, Challenge CoHoMa
Point de contact : Gauthier Picard (DTIS)