
Compute (skew-)$\mu$ upper and lower bounds with desired accuracy for mixed perturbations.
Description
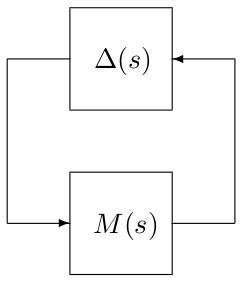
This routine computes both (skew-)$\mu$ upper and lower bounds for an interconnection between a nominal LTI system $M(s)$ and a block-diagonal operator $\Delta(s)= diag\left(\Delta_1(s),\dots,\Delta_N(s)\right)$. A branch and bound scheme is implemented: the real parametric domain is partitioned in more and more subsets until the highest lower bound lbnd and the highest upper bound ubnd computed on all subsets satisfy ubnd$\,\le$(1+maxgap)*lbnd, where maxgap is a user-defined thresohld. The considered stability region can be bounded either by the imaginary axis or by a truncated sector.
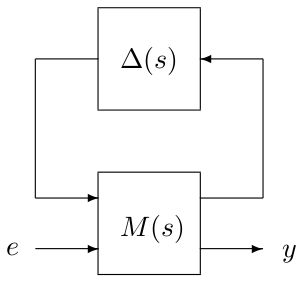
This routine can also be used to solve a worst-case $\mathcal{H}_\infty$ performance problem, which is nothing but a specific skew-$\mu$ problem. A fictitious stable and proper real-rational unstructured transfer matrix is just added between the output $y$ and the input $e$. An example is given at the bottom of this page. In this case, the output argument bnds contains lower and upper bounds on the worst-case $\mathcal{H}_\infty$ norm of the transfer matrix from $e$ to $y$.
Warning: This algorithm always converges for systems with only real uncertainties, even if maxgap is chosen arbitrarily small. Note however that maxgap allows to handle the tradeoff between accuracy and computational complexity, and that very small values can sometimes lead to prohibitive computational times. Moreover, the algorithm usually exhibits an exponential growth of computational complexity as a function of the number of real uncertainties. In this context, the $\mu$-sensitivities can be used to get the same accuracy with a reduced number of iterations (see options.musen).
Syntax
[bnds,wc,pert,tab,elts]=mubb_mixed(sys,blk{,options})
Input arguments
The first two input arguments are mandatory:
sys | LTI object describing the nominal system $M(s)$. |
blk | Matrix defining the structure of the block-diagonal operator $\Delta(s)=diag\left(\Delta_1(s),...,\Delta_N(s)\right)$. Its first 2 columns must be defined as follows for all $i=1,...,N$:
A third column can be used to specify skew uncertainties:
If none, |
The third input argument options is an optional structured variable with fields:
maxgap | Maximum gap between the bounds. The default value is options.maxgap=0.05, i.e. 5%. In case of a $\mu$-test, (options.umax>0), options.maxgap is used to set options.tol in muub_mixed. |
maxcut | Maximum number of times the real parametric domain can be bisected. The default value is options.maxcut=100. |
maxtime | Maximum computational time. The default value is options.maxtime=Inf. |
musen | If options.musen=0, the parametric domain is always bisected along its longest edge (classical branch and bound algorithm). If options.musen=Inf, the parametric domain is always bisected along the edge with the highest mu-sensitivity. If options.musen=m is a strictly positive integer, the algorithm switches between the two strategies every m iterations in case of slow progress.The default value is options.musen=10. |
freq | Frequency interval $\Omega$ in rad/s on which the bounds are to be computed. The default value is options.freq=[0 10*max(abs(eig(sys)))]. |
sector | Vector $[\alpha\ \xi]$ or $[\alpha\ \xi\ \omega_c]$ characterizing the considered truncated sector (see display_sector for a complete description). The default value is options.sector=[0 0], which means that the left half plane is considered. |
trace | Trace of execution. The default value is options.trace=1. An 's' in the first column indicates that the $\mu$-sensitivities have been used. |
warn | Warnings display. The default value is options.warn=1. |
umax | If nonzero, the algorithm checks whether the (skew-)$\mu$ upper bound is less than options.umax ($\mu$-test). In this case, no lower bound is computed. The default value is options.umax=0. |
Additional fields can be defined if necessary: lmi, reg, maxiter for upper bound computation (see muub_mixed) ; method, improve, grid for lower bound computation (see mulb_mixed or mulb_nreal).
Output arguments
bnds | (Skew-)$\mu$ lower and upper bounds lbnd and ubnd on the considered frequency interval $\Omega$. ubnd is valid only if the algorithm succeeds, i.e. if elts.invalid is empty. |
wc | Frequency $\omega_c$ in rad/s for which lbnd has been computed. |
pert | Unless lbnd=0, every perturbation $\tilde{\Delta}(s)$ whose frequency response $\tilde{\Delta}(\omega_c)$ at $j\omega_c$ (or at the corresponding point on the boundary of the truncated sector defined by options.sector) is equal to pert satisfies $\mbox{det}(I-M(\omega_c)\tilde{\Delta}(\omega_c))\approx 0$, where $M(\omega_c)$ is the frequency response of $M(s)$. |
tab | Structured variable with fields:
|
elts | Structured variable with fields
|
Examples
1. Classical $\mu$ problem
System with 60 states and 3 repeated uncertainties:minz=1;alpha=0;while minz>0.03 || alpha>-0.25
$\ \ \ $ sys=rss(60,30,30)/100;
$\ \ \ $ [om,z]=damp(sys);
$\ \ \ $ minz=min(z);
$\ \ \ $ alpha=max(real(eig(sys)));endblk=[-10 0;-15 0;-5 0];
Computation of upper and lower bounds:[ubnd,wc,tab]=muub_mixed(sys,blk); [lbnd,wc,pert]=mulb_nreal(sys,blk);100*(ubnd/lbnd-1)
The gap between the bounds is quite large.
Computation of upper and lower bounds with desired accuracy:options.maxgap=0.01;[bnds,wc,pert,tab,elts]=mubb_mixed(sys,blk,options);
The computational time is higher but the gap is now only 1%.
2. Worst-case $\mathcal{H}_\infty$ performance problem
System with 60 states and 2 repeated uncertainties, which are both kept inside the unit ball. The third block of $\Delta(s)$ corresponds to the performance channel:blk=[-10 0 0;-15 0 0;5 5 1];[bnds,wc,pert,tab,elts]=mubb_mixed(sys,blk,options);
See also
Reference
| [1] | C. Roos, F. Lescher, J-M. Biannic, C. Doll and G. Ferreres, "A set of $\mu$-analysis based tools to evaluate the robustness properties of high-dimensional uncertain systems", in Proceedings of the IEEE Multiconference on Systems and Control, Denver, Colorado, September 2011, pp. 644-649. |