
Compute (skew-)$\mu$ upper bounds for mixed perturbations.
Description
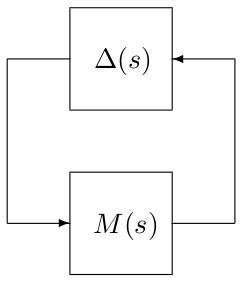
This routine computes a (skew-)$\mu$ upper bound for an interconnection between a nominal LTI system $M(s)$ and a block-diagonal operator $\Delta(s)= diag\left(\Delta_1(s),\dots,\Delta_N(s)\right)$. A bound and associated $D$ and $G$ scaling matrices are first computed at a given frequency. The largest frequency interval on which they remain valid is then obtained. This strategy is repeated until the whole frequency range is covered which leads to a guaranteed upper bound. The considered stability region can be bounded either by the imaginary axis or by a truncated sector.
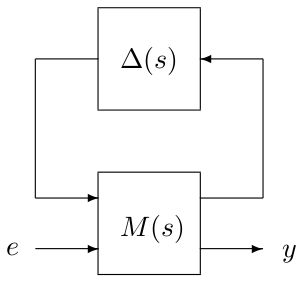
This routine can also be used to solve a worst-case $\mathcal{H}_\infty$ performance problem, which is nothing but a specific skew-$\mu$ problem. A fictitious stable and proper real-rational unstructured transfer matrix is first added between the output $y$ and the input $e$, and its size is then maximized under the constraint that the interconnection is stable $\forall\Delta(s)\in\mathcal{B}_{\bf\Delta}$. An example is given at the bottom of this page. In this case, the output argument ubnd is a guaranteed upper bound on the worst-case $\mathcal{H}_\infty$ norm of the transfer matrix from $e$ to $y$.
Syntax
[ubnd,wc,tab,pb]=muub_mixed(sys,blk{,options})Input arguments
The first two input arguments are mandatory:
| sys | LTI object describing the nominal system $M(s)$. |
| blk | Matrix defining the structure of the block-diagonal operator $\Delta(s)=diag\left(\Delta_1(s),...,\Delta_N(s)\right)$. Its first 2 columns must be defined as follows for all $i=1,...,N$:
A third column can be used to specify skew uncertainties:
If none, blk(i,3) is set to 1 for all $i=1,...,N$. |
The third input argument options is an optional structured variable with fields:
| w0 | Starting frequency point in rad/s. The default value is options.w0=0. |
| freq | Frequency interval $\Omega$ in rad/s on which the upper bound is to be computed. The default value is options.freq=[0 max([10*abs(eig(sys)) options.w0])]). |
| sector | Vector $[\alpha\ \xi]$ or $[\alpha\ \xi\ \omega_c]$ characterizing the considered truncated sector (see display_sector for a complete description). The default value is options.sector=[0 0], which means that the left half plane is considered. |
| lmi | If options.lmi=1, the LMI-based characterization of a (skew-)$\mu$ upper bound is used instead of the $\overline{\sigma}$-based one for better accuracy. The default value is options.lmi=0. Note that setting options.lmi=1 in the presence of highly repeated parametric uncertainties (i.e. blocks $\Delta_i(s)=\delta_iI_{n_i}$ with $n_i\ge 10$), may lead to high computational costs. |
| trace | Trace of execution. The default value is options.trace=1. |
| warn | Warnings display. The default value is options.warn=1. |
| target | Value of the upper bound above which the algorithm is interrupted. The default value is options.target=Inf. |
| init | Initial guess (typically a (skew)-$\mu$ lower bound). The default value is options.init=0. |
| reg | Regularization for real-$\mu$ problems. The default value is options.reg=0.01, i.e. 1% of complex uncertainty is added in case of convergence problems. |
| tol | At each iteration, the (skew-)$\mu$ upper bound is increased by a factor of 1+options.tol before the interval on which the scaling matrices are valid is computed. The default value is options.tol=0.01. |
| maxiter | Maximum number of iterations. The default value is options.maxiter=1000. |
| elim | A pawl effect on $\mu$ is used to fasten the elimination technique if options.elim=1. Better estimates of secondary peaks are obtained if options.elim=0. The default value is options.elim=1. |
| smm | Method for the iterative calls to mussv in case of a skew-$\mu$ problem (1 $\Leftrightarrow$ fixed-point algorithm, 2 $\Leftrightarrow$ dichotomy search). The default value is options.smm=1. This option is ignored if options.lmi is nonzero. |
Output arguments
| ubnd | (Skew-)$\mu$ upper bound on the considered frequency interval $\Omega$. |
| wc | Frequency in rad/s for which ubnd has been computed. |
| tab | Structured variable with fields (see plot_muub):
|
| pb | Indicates a convergence problem when non-zero:
|
Examples
1. Computation of a $\mu$ upper bound
System with 46 states and 20 non-repeated real parametric uncertainties:
load flexible_airplane
[ubnd,wc,tab]=muub_mixed(sys,blk);ubnd
Improvement of the result at the price of a higher computational time:
options.tol=0;
options.lmi=1;
[ubnd,wc,tab]=muub_mixed(sys,blk,options);ubnd
Computation on a limited frequency range:
options.freq=[0 10];
[ubnd,wc,tab]=muub_mixed(sys,blk,options);ubnd 2. Computation of a skew-$\mu$ upper bound
System with 10 states and 3 uncertainties. The second one is kept inside the unit ball:
sys=rss(10,5,5);
sys=ss(sys.a-0.1*eye(10),sys.b/10,sys.c/10,sys.d/100);
blk=[-2 0 1;-1 0 0;2 2 1]; [ubnd,wc,tab]=muub_mixed(sys,blk);ubnd 3. Computation of an upper bound on the worst-case $\mathcal{H}_\infty$ norm
System with 10 states and 2 uncertainties, which are both kept inside the unit ball. The third block of $\Delta(s)$ corresponds to the performance channel:
blk=[-2 0 0;-1 0 0;2 2 1];
[ubnd,wc,tab]=muub_mixed(sys,blk);ubndSee also
muub
muub_lmi
plot_muub
display_sector
References
| [1] | G. Ferreres, J-F. Magni and J-M. Biannic, "Robustness analysis of flexible structures: practical algorithms", International Journal of Robust and Nonlinear Control, vol. 13, no. 8, pp. 715-734, 2003. |
| [2] | J-M. Biannic and G. Ferreres "Efficient computation of a guaranteed robustness margin", in Proceedings of the 16th IFAC World Congress, Prague, Czech Republic, July 2005. |
| [3] | C. Roos and J-M. Biannic, "Efficient computation of a guaranteed stability domain for a high-order parameter dependent plant", in Proceedings of the American Control Conference, Baltimore, Maryland, July 2010, pp. 3895-3900. |