
Compute (skew-)$\mu$ upper bounds on a grid with LMI tools.
Description
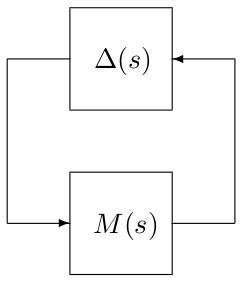
This routine computes a (skew-)$\mu$ upper bound for an interconnection between a nominal LTI system $M(s)$ and a block-diagonal operator $\Delta(s)= diag\left(\Delta_1(s),\dots,\Delta_N(s)\right)$. The bound is computed on a frequency grid $(\omega_k)_{k\in [1,m]}$ and the resulting $D$ and $G$ scaling matrices have the same values for all frequency points.
Syntax
[ubnd,D,G,S]=muub_lmi(M,blk{,options})
Input arguments
The first two input arguments are mandatory:
M | 2-D or 3-D numeric array describing the LTI system $M(s)$. M(:,:,k) corresponds to the frequency response $M(j\omega_k)$. |
blk | Matrix defining the structure of the block-diagonal operator $\Delta(s)=diag\left(\Delta_1(s),...,\Delta_N(s)\right)$. Its first 2 columns must be defined as follows for all $i=1,...,N$:
A third column can be used to specify skew uncertainties:
If none, |
The third input argument options is an optional structured variable with fields:
target | The LMI solver stops if the (skew-)$\mu$ upper bound becomes lower than target. The default value is options.target=0. |
epsilon | The constraint $D>\epsilon I$ is considered instead of $D>0$. The default value is options.epsilon=1e-8. |
lmiopt | Tuning parameters of the LMI solver (see the routine gevp or mincx of the Robust Control Toolbox). The default value is options.lmiopt=[0.02 100 1e10 5 1]. |
Output arguments
ubnd | (Skew-)$\mu$ upper bound $\beta$. |
D | $D$ scaling matrix. |
G | $G$ scaling matrix. |
S | $S$ matrix (for skew-$\mu$ problems only). |
In case of a classical $\mu$ problem, the output arguments satisfy: $$M^*(j\omega_k)DM(j\omega_k)+j(GM(j\omega_k)-M^*(j\omega_k)G)\le\beta^2D\ \ \ \textrm{for all}\ \ \ k=1,\dots,m$$ where the $\mu$ upper bound $\beta$ is minimized. In case of a skew-$\mu$ problem, the output arguments satisfy: $$M^*(j\omega_k)DM(j\omega_k)+j(GM(j\omega_k)-M^*(j\omega_k)G)\le S(\beta)D\ \ \ \textrm{for all}\ \ \ k=1,\dots,m$$ where the skew-$\mu$ upper bound $\beta$ is minimized, and $S(\beta)=diag\left(S_1(\beta),\dots,S_N(\beta)\right)$ is a block-diagonal matrix such that:
- $S_i(\beta)=I_{n_i}$ if
blk(i,3)=0, - $S_i(\beta)=\beta^2I_{n_i}$ if
blk(i,3)=1.
Examples
sys=rss(20,14,14)/10;M=freqresp(sys,1:5);
1. Computation of a $\mu$ upper bound blk=[-2 0 1;3 0 1;3 3 1;-1 0 1;1 0 1;1 1 1;-3 0 1];[ubnd,D,G]=muub_lmi(M,blk);ubndfor k=1:5
$\ \ \ $ max(real(eig(M(:,:,k)'*D*M(:,:,k)+1i*(G*M(:,:,k)-M(:,:,k)'*G)-ubnd^2*D)))end
All eigenvalues are negative at each considered frequency.
2. Computation of a skew-$\mu$ upper bound blk=[-2 0 0;3 0 0;3 3 1;-1 0 0;1 0 1;1 1 0;-3 0 1];[ubnd,D,G,S]=muub_lmi(M,blk);ubndfor k=1:5
$\ \ \ $ max(real(eig(M(:,:,k)'*D*M(:,:,k)+1i*(G*M(:,:,k)-M(:,:,k)'*G)-S*D)))end
All eigenvalues are negative at each considered frequency.